Article | 19/08/2012
Curiosity, un premier point deux semaines après l'arrivée sur Mars
19/08/2012
Résumé
Quelques images du robot Curiosity et premiers objectifs de la mission Mars Science Laboratory.
Le 6 août à 7h31 (heure française), le robot Curiosity s'est posé avec succès sur Mars. Cela fait maintenant deux semaines que cet évènement a eu lieu, et il est temps de faire un premier point.

Source - © 2012 NASA/Bill Ingalls
Mission réussie au Jet Propulsion Laboratory.
Vous pouvez avoir une idée (1) du déroulement de l'atterrissage qui s'est déroulé comme prévu, (2) de la géologie du cratère Gale, site d'atterrissage telle qu'elle a pu être déterminée depuis l'orbite et (3) de l'équipement scientifique du rover en (re)consultant les diaporamas présentant la mission Mars Science Laboratory proposés avant l'arrivée sur Mars de Curiosity.
Pour suivre vous-même l'activité du rover dans les années qui viennent, la NASA propose un site dédié à la mission Mars Science Laboratory (MSL) et à Curiosity.
Qu'a fait le robot depuis son atterrissage ? Son principal travail depuis le 6 août a été de faire un check-up complet de tous ses équipements techniques et scientifiques. Aux dernières nouvelles, tout va bien. Les seuls "résultats scientifiques" actuels sont des images : (1) images prises depuis l'orbite par la sonde Mars Reconnaissance Orbiter (MRO), aussi bien images de la descente qu'images du site d'atterrissage, et (2) images et film pris pendant la descente et au sol par les 17 caméras de Curiosity.

Source - © 2012 NASA/JPL-Caltech
Figure 2. Les 17 caméras de Curiosity
Sur le corps du rover, il y a MARDI qui a été utilisé pendant la descente, et 8 caméras Hazcam, reliées à l'ordinateur de bord pour l'aider en direct à éviter d'éventuels obstacles pendant sa progression. Sur le mat déployable, il y a 4 caméras de navigation (Navcam), 2 caméras panoramiques (Matcam), et 1 caméra "chimique" (Chemcam). Sur le bras manipulateur, il y a la caméra "microscope" (MAHLI).
Toutes les images "brutes" (raw images) sont disponibles sur le site de MSL, partie "raw" .
Les images sélectionnées, traitées et commentées par la NASA sont sur le site de MSL, partie "images".
Les vidéos de la mission MSL peuvent être vues ou téléchargées sur la partie "video" de ce même site.
La descente a été filmée par la caméra MARDI. Elle est disponible sur les archives vidéo (en date du 10 août 2012). La descente a aussi été photographiée par MRO, et on y voit très bien Curiosity pendu au bout de son parachute.
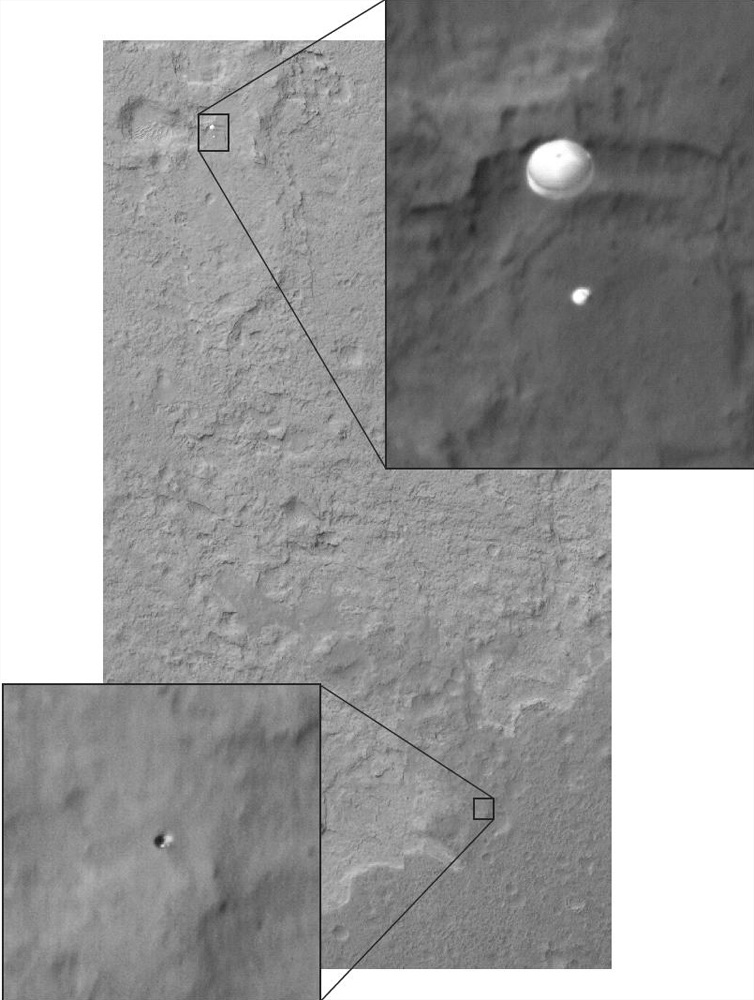
Source - © 2012 NASA/JPL-Caltech/Univ. of Arizona
Figure 3. Curiosity en train de descendre suspendu à son parachute, photographié par MRO
Le point noir en bas de l'image correspond au bouclier thermique.
Le site d'atterrissage a été parfaitement localisé dans l'ellipse prévue, un peu à l'Est du centre de cette ellipse, à 5 km au Nord de la base du Mont Sharp, la montagne centrale du cratère Gale.
 Source - © 2012 NASA/JPL-Caltech/ESA/DLR/FU Berlin/MSSS La montagne centrale a été nommée, de manière informelle, le Mont Sharp. Le Nord est en haut. | 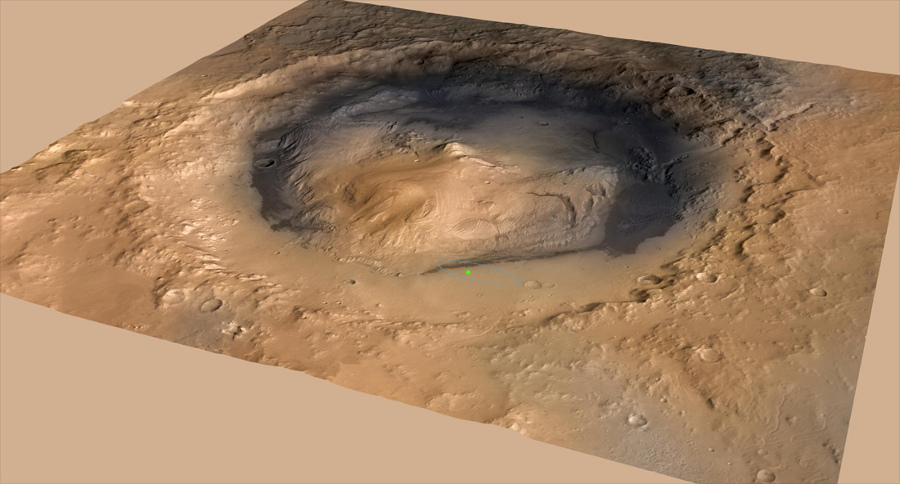 Source - © 2012 NASA/JPL-Caltech/ESA/DLR/FU Berlin/MSSS La montagne centrale a été nommée, de manière informelle, le Mont Sharp. Par rapport à la figure précédente, l'orientation est changée, et le Nord est en bas à droite. Source : http://photojournal.jpl.nasa.gov/catalog/PIA16058 |
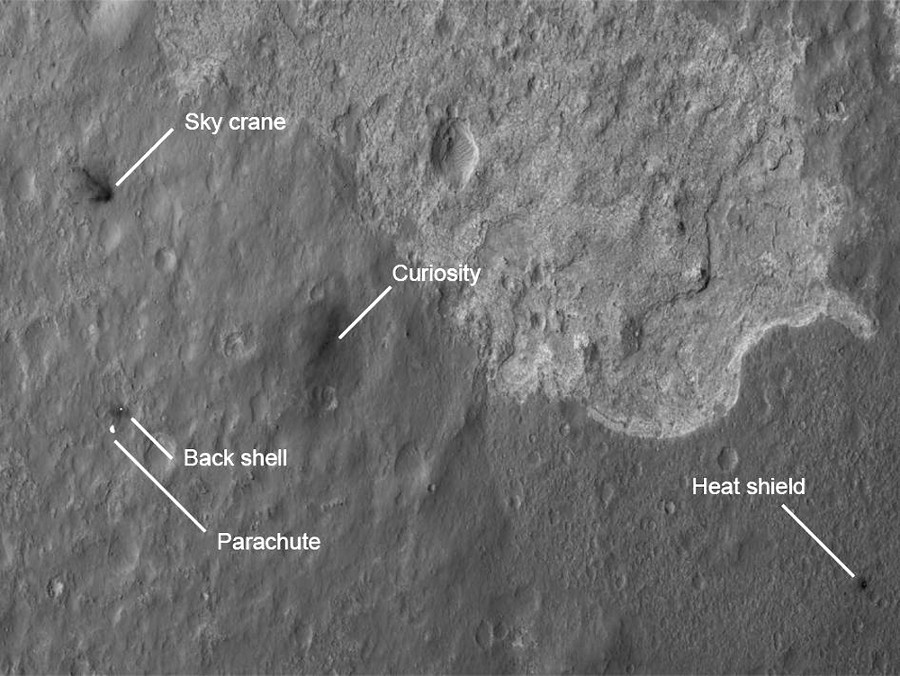 Source - © 2012 NASA/JPL-Caltech/Univ. of Arizona Figure 6. Vue détaillée (MRO) du site d'atterrissage de Curiosity Vue couvrant environ 2600 m de gauche à droite, le Nord est en haut. On voit les points d'impact de l'étage de descente et de sa grue (sky crane) et du bouclier thermique (heat shield). On voit aussi la coquille arrière (back shell) encore attachée à son parachute, ainsi que le site exact où s'est posé Curiosity. Le Mont Sharp est à 5 km, vers le bas à droite. | |
Les premières images ont été prises par les caméras fish-eye des Hazard-Avoidance Cameras, caméras directement reliées à l'ordinateur de bord de Curiosity pour lui faire éviter les obstacles imprévus qui surviendraient pendant sa progression. Les images étaient transmises par Curiosity dès les premières minutes qui ont suivi l'atterrissage, mais avec une résolution (volontairement) dégradée afin de ne pas saturer les transmissions qui avaient beaucoup à transmettre en ces minutes cruciales.
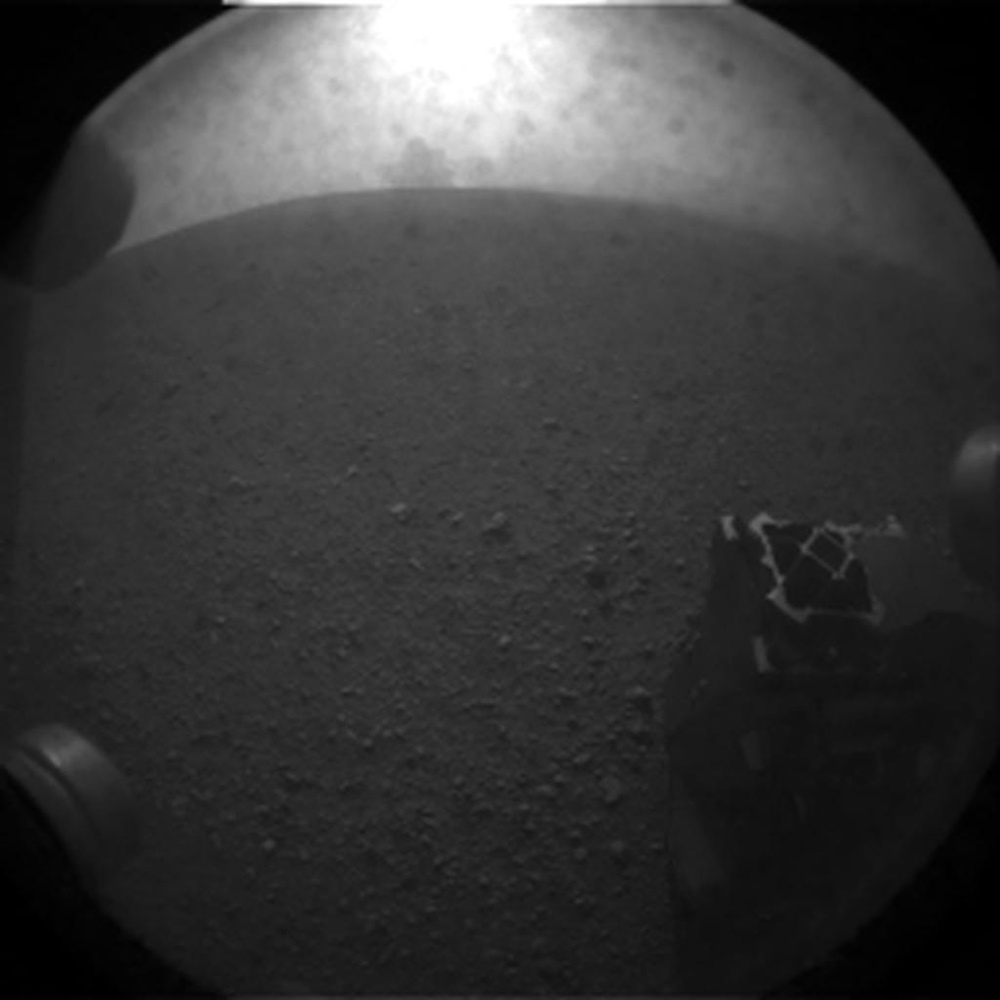 Source - © 2012 NASA/JPL-Caltech Figure 7. Première image transmise par Curiosity, prise par une des hazcams arrière On n'y voit pas grand-chose, à part quelques cailloux et des morceaux du rover. Mais cela a montré que tout fonctionnait bien à bord. |  Source - © 2012 NASA/JPL-Caltech Figure 8. Deuxième image transmise par Curiosity, prise par une des hazcams avant On voit l'ombre du rover, des cailloux, une étrange ligne courbe noire, et une espèce de triangle clair à l'arrière plan. |
Dès le deuxième jour, après réception des image à résolution normale, puis traitements, redressements pour "dé-fisheyser" les images…, les paysages avant et arrière apparaissent plus nettement.
 Source - © 2012 NASA/JPL-Caltech Figure 9. Image haute résolution et traitée prise par une des cameras hazcams arrière Le progrès par rapport à la figure brute et basse résolution est saisissant. |  Source - © 2012 NASA/JPL-Caltech Figure 10. Image haute résolution et traitée prise par une des cameras hazcams avant Le progrès par rapport à la figure brute et basse résolution est saisissant. La ligne noire s'avère être un élément du paysage (des dunes sombres d'après les vues orbitales), et le triangle blanc se révèle être le Mont Sharp. Ce Mont Sharp domine le fond du cratère de 5000 m. Son sommet est situé à 20 km de Curiosity. |
Le troisième jour, le mat portant les 4 caméras de navigation (Navcam) et les 2 caméras panoramiques (Mastcam) se déploie. Toutes ces images ont été transmises et mises en ligne du quatrième au neuvième jour. Le premiers objectif chronologiques de ces caméras a été de photographier du haut du mat le rover sous toutes les coutures pour voir si des anomalies apparaissaient. Rien n'a été diagnostiqué. Ces dizaines d'images d'auto-diagnostic ont été réunies en mosaïques que la NASA a essayer de dé-déformer pour les rendre "présentables".

Source - © 2012 NASA/JPL-Caltech, modifié
Au fond, le bord externe du cratère Gale.
Puis les caméras panoramiques sont entrées en service, en faisant dans un premier temps un tour d'horizon d'une douzaine d'images couvrant les 360°. Malheureusement, lors de ce tour d'horizon, les caméras visaient trop bas, et le sommet du Mont Sharp n'a pas été photographié. La NASA a publié plusieurs versions de mosaïques en noir et blanc couvrant les 360°, ainsi que 30 images brutes qui m'ont permis de faire quelques mosaïques couleurs "artisanales".
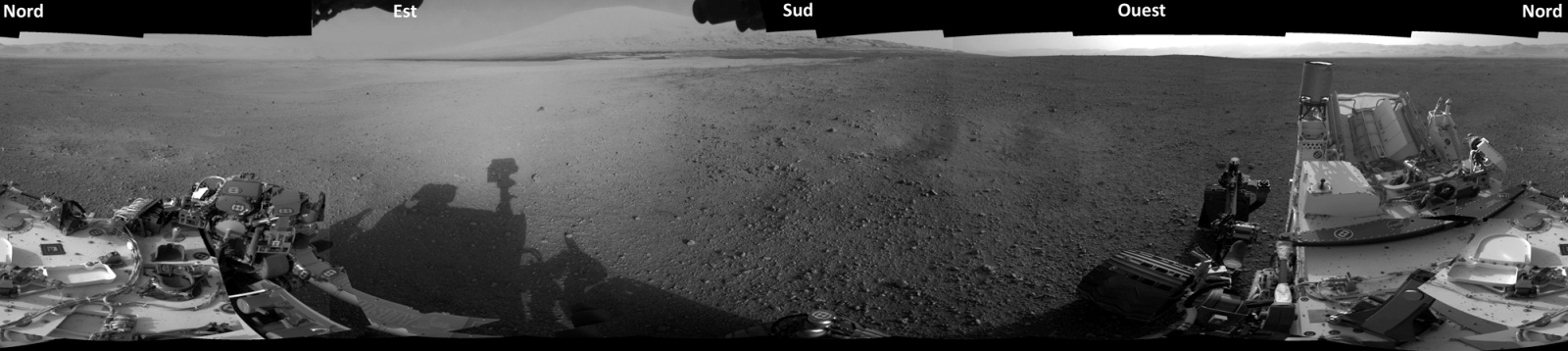
Source - © 2012 NASA/JPL-Caltech,, NASA/JPL-Caltech, , modifiées
Figure 12. Une mosaïque "artisanale" en "noir et blanc" de 360° autour de Curiosity
Mosaïque bricolée, sommairement orientée, en raboutant une mosaïque "noir et blanc" de 360°, mise en ligne par la NASA (Image de 7703 x 1678 pixel, sans orientation), et une image du sommet du Mont Sharp, en mettant le Mont Sharp au centre de l'image.

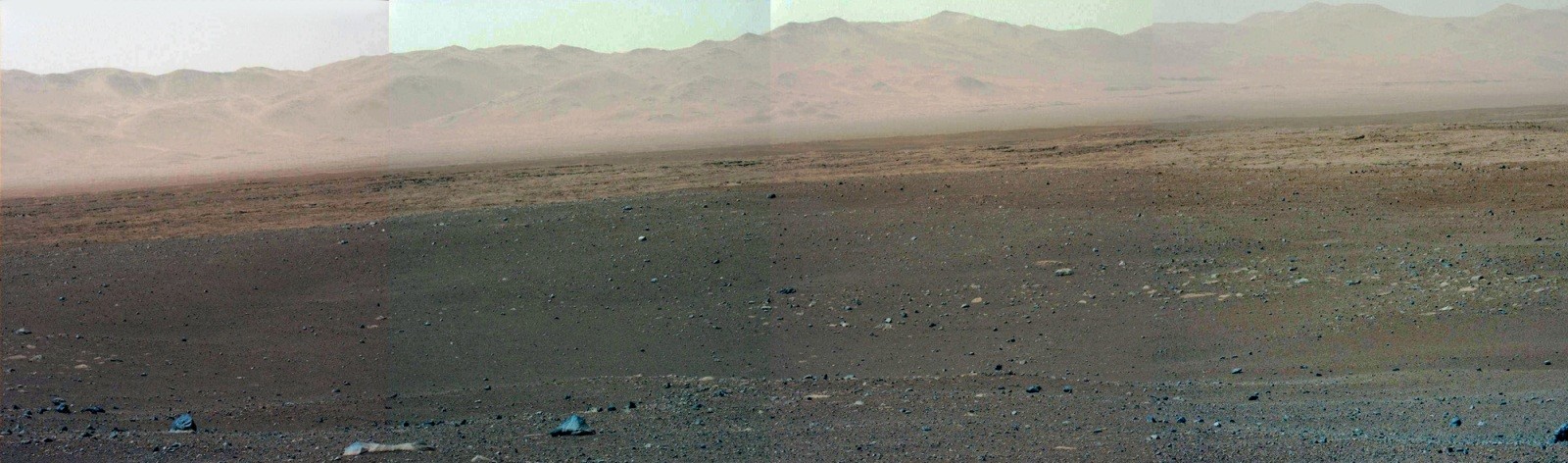
Source - © 2012 NASA/JPL-Caltech/Malin Space Science Systems, modifiées
Les strates basales sont particulièrement visibles.

Source - © 2012 NASA/JPL-Caltech/Malin Space Science Systems, modifiées
Les strates basales sont particulièrement visibles.

Source - © 2012 NASA/JPL-Caltech/Malin Space Science Systems, modifiées
Le rebord Est du cratère Gale se devine à l'horizon.
Source - © 2012 NASA/JPL-Caltech/Malin Space Science Systems, modifiées

Source - © 2012 NASA/JPL-Caltech/Malin Space Science Systems, modifiées
La NASA a également publié quelques gros plans des environs immédiats, ce qui dispense d'aller les chercher dans les images brutes et d'en faire soi-même des mosaïques avec les traitements que cela implique.

Source - © 2012 NASA/JPL-Caltech/MSS
On reconnait un conglomérat, avec des clastes d'environ 3 cm de côté (flèches supérieures) et un de 10 cm (flèche inférieure) pour l'un des blocs. L'origine de ce conglomérat (sédimentaire, brèche d'impact…) sera déterminé quand on s'approchera de cet affleurement.
À très court terme (dans les jours qui viennent), que va faire Curiosity ? Il va essayer ses 6 roues motrices (dont 4 directionnelles), ainsi que ses instruments scientifiques (ceux qui ont un usage "illimité"). Il va en particulier tester sa Chemcam, instrument français, sur des cibles étalons embarquées à fin de re-calibrage, puis, sur un bloc rocheux déjà choisi à proximité.
 Source - © 2012 NASA/JPL-Caltech/MSSS/LANL |  Source - © 2012 NASA/JPL-Caltech/MSSS/LANL |
À court terme, le premier objectif scientifique se situe au point nommé Glenelg, situé à 400 m à l'Est-Sud-Est du site d'atterrissage. Puis, sans préjuger de ce qui sera découvert sur le trajet et qui pourrait modifier la stratégie scientifique, le robot se dirigera vers la base du Mont Sharp (située à 7 km), en une zone où la topographie en permettra a priori l'ascension. Mais c'est une autre histoire, et nous en reparlerons dans plusieurs mois.
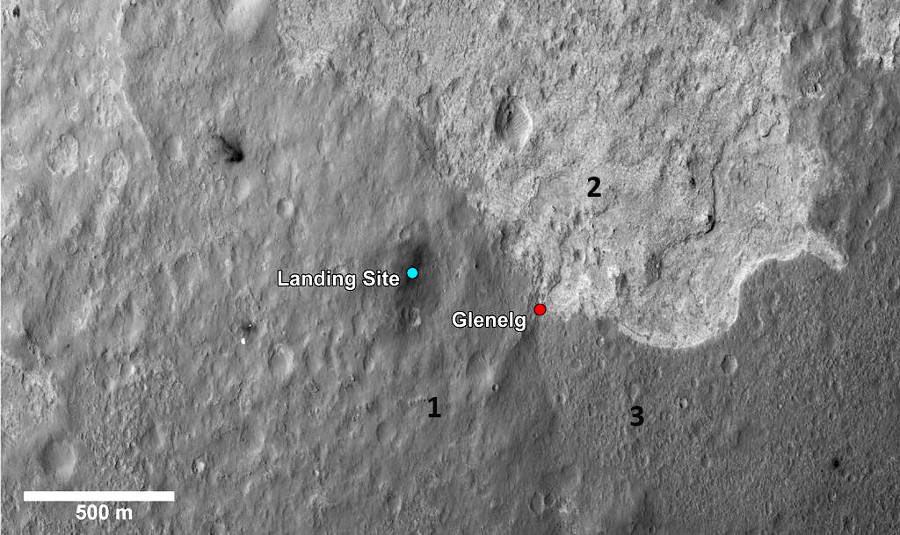 Source - © 2012 NASA/JPL-Caltech/Univ. of Arizona Figure 21. Le point nommé Glenelg, premier objectif scientifique de Curiosity Sur cette image MRO, on voit que ce site est située à une triple frontière géologique, séparant 3 types de terrains (faire ainsi d'une pierre trois coup) : le terrain (1) où s'est posé Curiosity et qu'il étudiera sur son site d'atterrissage en testant ses instruments, puis le long de son trajet vers Glenelg, le terrain (2) plus clair et apparemment stratifié, et un terrain (3) de teinte intermédiaire mais plus riche en cratères d'impact, donc plus vieux. |  Source - © 2012 NASA/JPL-Caltech/Univ. of Arizona |



