
Article | 12/09/2013
Une sélection de panoramas issus de l'exploration de Mars par sondes et robots
12/09/2013
Résumé
Images martiennes réalisées à partir des données renvoyées par les sondes (Phoenix) et robots (Spirit, Opportunity, Curiosity) ayant exploré la surface de la planète rouge.
Table des matières
Depuis janvier 2004, quatre sondes / robots se sont posées avec succès à la surface de Mars et y ont travaillé des mois ou des années. Phoenix (25 mai – 10 novembre 2008) et Spirit (4 janvier 2004 – 25 mai 2011) ont cessé de fonctionner. Opportunity (atterrissage le 25 janvier 2004) et Curiosity (atterrissage le 6 août 2012) fonctionnent encore en ce mois de septembre 2013.
Phoenix était une sonde fixe (lander), les trois autres mobiles (rovers). Spirit a parcouru 7730 m avant d'être définitivement immobilisé par un rocher. Opportunity avait parcouru 38 189 m le 16 août 2013, et Curiosity a dépassé la barre des 1000 m le 16 juillet 2013 et avance depuis d'environ 50 m par jour. Ces quatre robots ont pris des milliers et des milliers d'images (par exemple 183 379 déjà prises par Opportunity le 30 août 2013), images disponibles sur leur sites respectifs : Phoenix , Mars Exploration Rovers (Spirit et Opportunity)et Mars Science Laboratory (Curiosity). Sur chacun de ces sites, on a accès à toutes les images brutes (raw images) et à une sélection d'images et d'autres données choisies, traitées et commentées par la NASA (dans la rubrique "Press images" pour MER, et "Images" pour Curiosity. Cette sélection d'images et de données se trouvent aussi sur le site Photojournal (NASA/JPL) en cliquant sur la planète Mars ; il suffit alors de sélectionner la mission et le robot.
Parmi les images traitées, la NASA a réalisé des dizaines de mosaïques d'images individuelles, nous offrant ainsi de multiples panoramas de la surface de Mars. Ces panoramas peuvent ne couvrir qu'un champ limité, ou alors couvrir un champ circulaire de 360°. Ces panoramas peuvent exister en noir et blanc (N&B), mais aussi en trois types de panoramas couleur :
- panoramas N&B colorisés (par la NASA ou par tout un chacun) en colorant artificiellement la photo N&B dans des teintes rouges-orangées (les teintes dominantes de la surface de Mars) avec un logiciel de traitement d'images ;
- panoramas en « vraies couleurs » obtenus par la NASA en superposant des images prises avec des filtres laissant passer des longueurs d'onde différentes (c'est à peu près ce que verrait un homme se promenant sur Mars), là encore, les teintes rouges-orangées dominent ;
- panoramas dits en « fausses couleurs », traités par la NASA à partir des images prises à différentes longueurs d'onde, longueurs d'onde assemblées-renforcées-minimisées pour contrebalancer la lumière rougeâtre diffusée par l'atmosphère martienne. Ces images dites « fausses couleurs » correspondraient à peu près ce que verrait un homme se promenant sur une surface martienne éclairé par un éclairage de type terrestre. Sables, poussières et certaines roches restent rouges-orangés, d'autres roches virent vers le gris-bleu.
À côté de ces panoramas tout fait par la NASA, on peut bien sûr en faire soi-même en assemblant des images brutes, ou aller sur des sites spécialisés qui, à côté des panoramas NASA en proposent d'autres, originaux, comme, par exemple, le site Marsrovers Images.
Nous vous proposons, ici, une sélection de 59 panoramas, exclusivement en couleurs : vraies couleurs, fausses couleurs et parfois (le plus rarement possible) en N&B colorisé quand la NASA n'a pas produit de panorama couleur dans un secteur particulièrement intéressant et représentatif.
Certains de ces panoramas sont pris tels quels parmi ceux proposés par la NASA. Mais souvent, nous les avons "arrangés". En effet les panoramas sont souvent sur 360°, ce qui ne correspond pas à la réalité ressentie par un homme qui n'a pas les yeux d'une libellule. Nous avons alors sélectionné un secteur limité, souvent d'environ 120° ce qui correspond au champ visuel d'un humain normal. Parfois, la zone que nous avons sélectionnée sur un panorama 360° était de part et d'autre des extrémités du panorama fourni par la NASA, nous avons alors "rabouté" ces deux extrémités. Parfois ces panoramas présentaient une certaine "courbure", nous les avons alors "redressés". Souvent, la NASA photographiait le sol, les roches et les collines, mais très peu le ciel, qui ne correspondait qu'à une étroite bande supérieure, souvent en forme d'escalier, nous avons alors rajouté du ciel. Parfois, les panoramas NASA privilégiaient les premiers plans, et coupaient à mi-pente les hauteurs à l'arrière-plan. Nous avons rajouté ces hauteurs d'arrière-plan quand elles existaient sur d'autres photos ou mosaïques prises depuis un lieu voisin. Et enfin, quelques panoramas ont été réalisés par nos soins. Quant aux couleurs, nous les avons souvent "travaillées" en s'inspirant des « vraies couleurs » parfois proposées par la NASA sur des photos voisines, de notre expérience des déserts terrestres… Et quand nous ne pouvions pas faire autrement, nous avons colorisé quelques panorama N&B.
Nous vous présentons ces panoramas robot par robot, très souvent dans l'ordre chronologique des prises de vue, parfois dans l'ordre chronologique de la mise en ligne des mosaïques quand la NASA a publié ses mosaïques plusieurs mois après les prises de vue élémentaires. Le choix a plus été basé sur la beauté et la "grandeur" de ces panoramas, plus que sur leur intérêt scientifique qui est malgré tout toujours présent. Nous avons volontairement limité les commentaires au strict minimum. Des précisions peuvent être obtenues en allant à l'adresse source de l'image. La (les) date(s) indiquée(s) correspondent aux dates de prises de vue. Dans l'article principal, la résolution de ces panoramas a été volontairement réduite; Des images à haute résolution sont proposées au téléchargement. Chacun pourra alors en extraire des parties de son choix, changer la répartition des couleurs…
Bon voyage à la surface de Mars !
Phoenix, sonde fixe (lander)
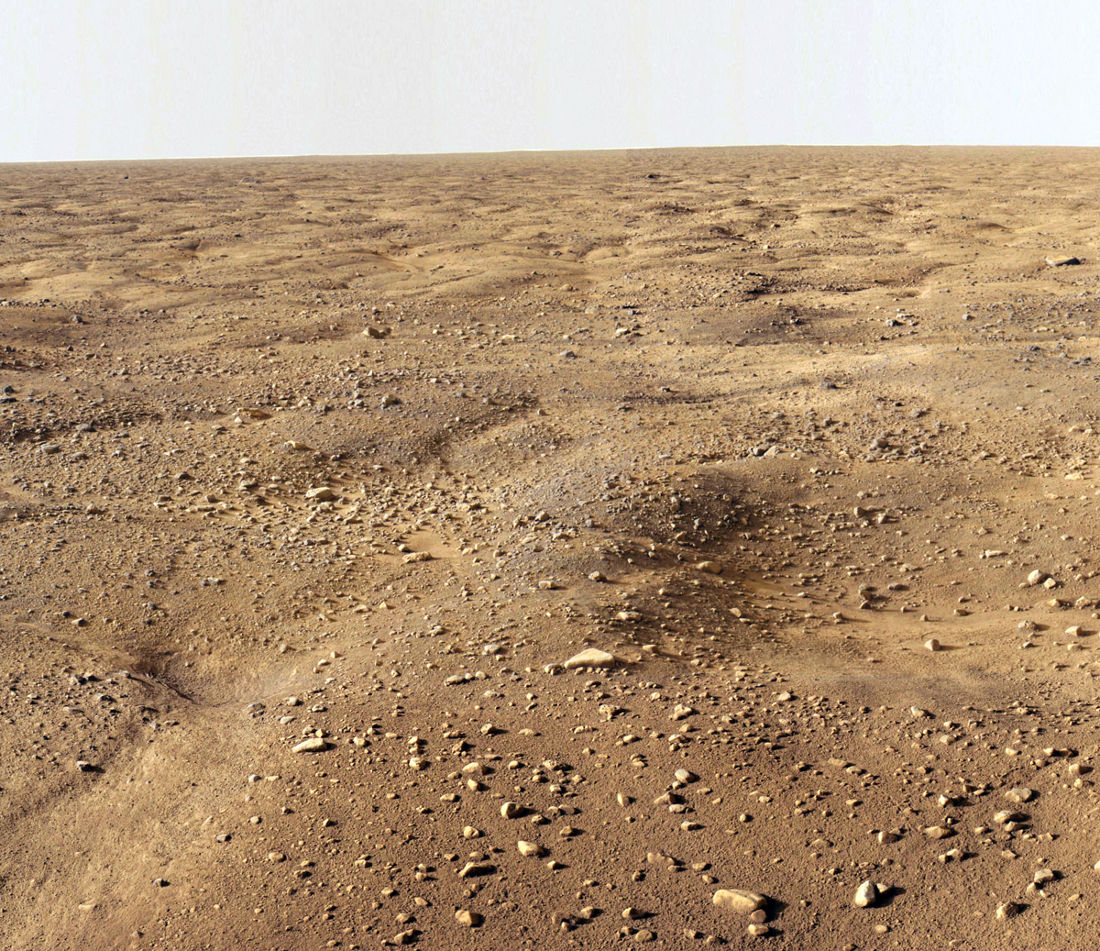
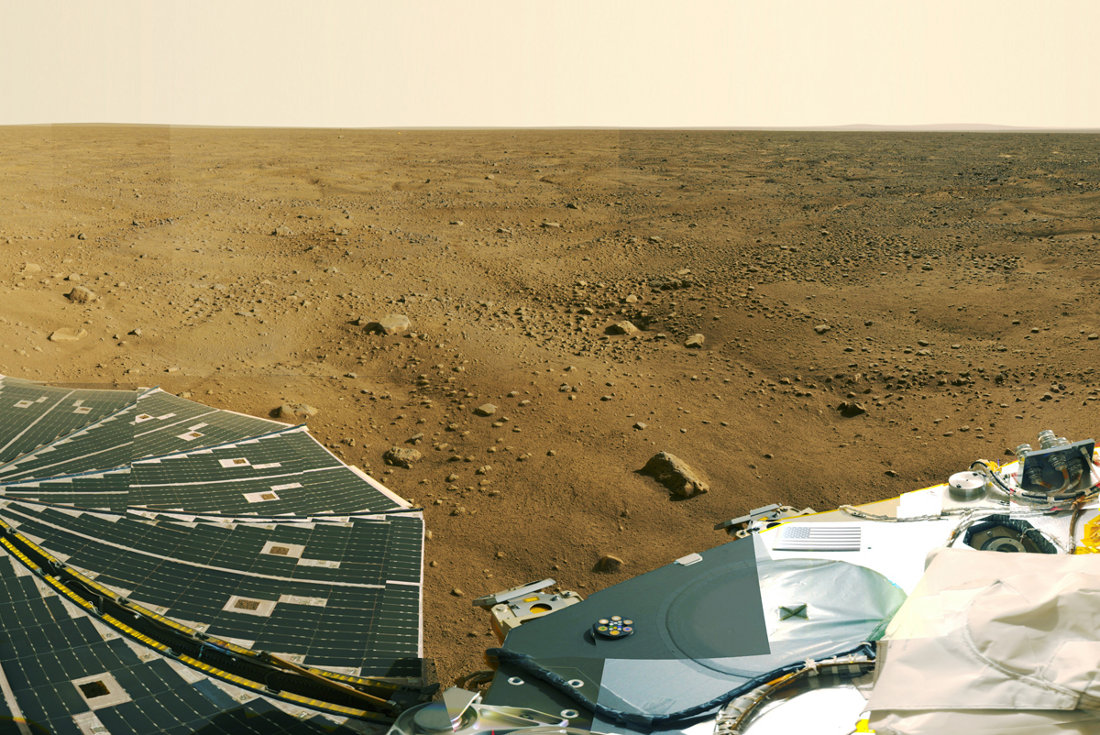
Nous ne vous montrons que deux fragments d'un panorama de 360°, forcément unique puisque Phoenix n'était pas mobile, résultats d'une mosaïque de plus de 100 photographies prises différents jours à différentes heures et avec différents filtres. On voit là le paysage caractéristique qui entoure Phoenix, et "classique pour les régions péri-polaires : des sols polygonaux à perte de vue.
Pour en savoir plus sur la mission Phoenix, voir Phoenix, atterrissage réussi sur Mars ; premières et rapides nouvelles du sol martien observé, Phoenix photographie, creuse et analyse le sol de Mars depuis 1 mois et Phoenix : de l'eau, des carbonates, des chutes de neige, un beau coucher de Soleil... et le lointain cratère Endeavour pour Opportunity.
Spirit, premier rover de la mission Mars Exploration Rover
Nous vous montrons 15 panoramas de Spirit. Pour tout savoir sur Spirit, ses résultats et l'interprétation des images présentées ici, aller sur les sites source de la NASA, ou sur un des nombreux articles de https://planet-terre.ens-lyon.fr/planetterre/ressources/dossiers-thematiques/nouvelles-mars tout ou partie consacrés à ce robot, la date des prises de vue permettant de retrouver facilement le ou les articles correspondant à ces images.
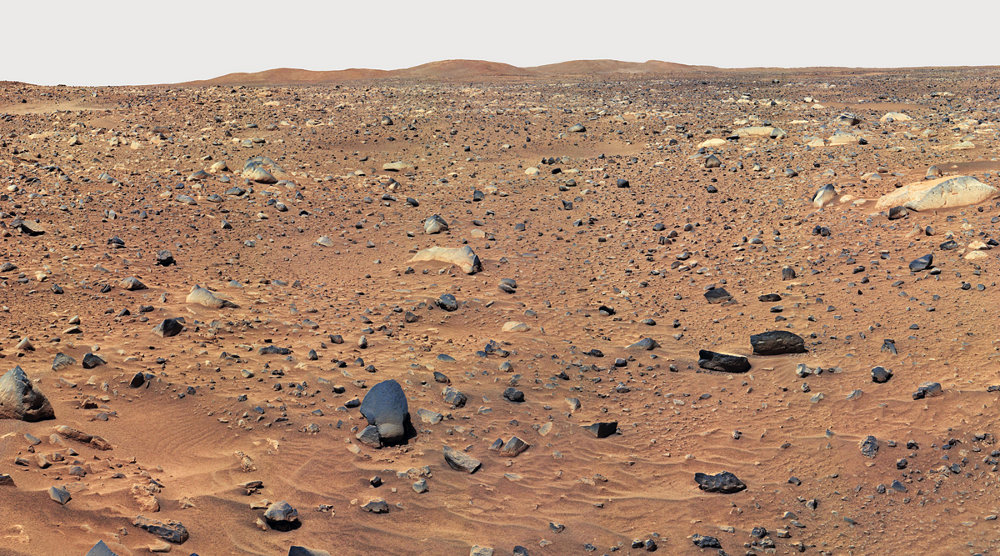 Source - © 2005 NASA/JPL/Cornell Figure 3. La plaine caillouteuse aux environs du site d'atterrissage de Spirit (3-5 mars 2004) Ces roches ont une chimie de basalte. Au fond, les Columbia Hills sur lesquelles montera Spirit dans les mois qui suivent. | 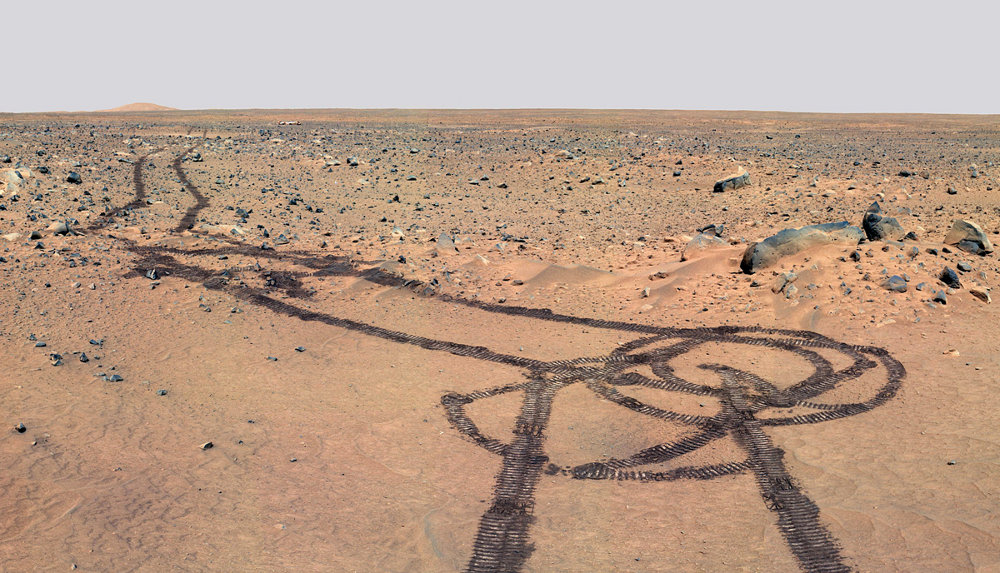 Source - © 2005 NASA/JPL/Cornell Certains ont voulu y voir une "blague" d'un pilote facétieux. Cette portion de panorama, mis en ligne en 2005 et fait d'images prises en 2004, a été redécouverte en 2013 par des internautes ne suivant pas assidûment l'actualité martienne. Il a fait un buzz et a souvent été attribué à tort à Curiosity. |
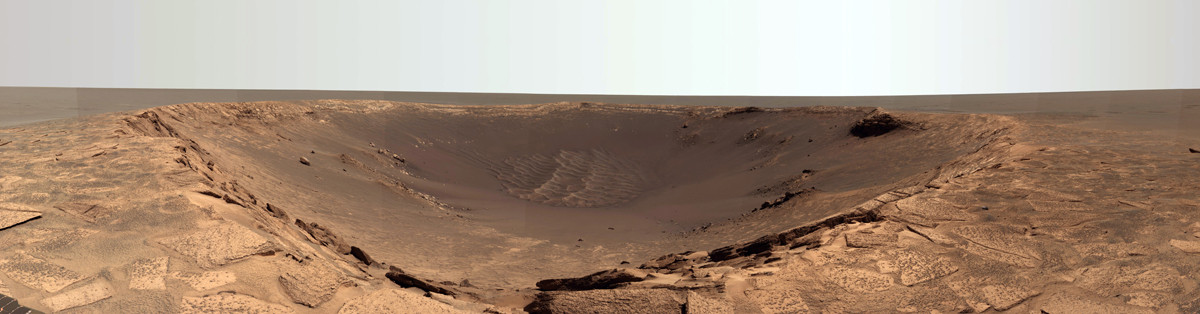
 Source - © 2004 NASA/JPL/Cornell Figure 5. Vue générale sur le cratère Bonneville, d'un diamètre de 200 m (12 mars 2004) Spirit a exploré les bords du cratère Bonneville, mais n'y est pas descendu. | |
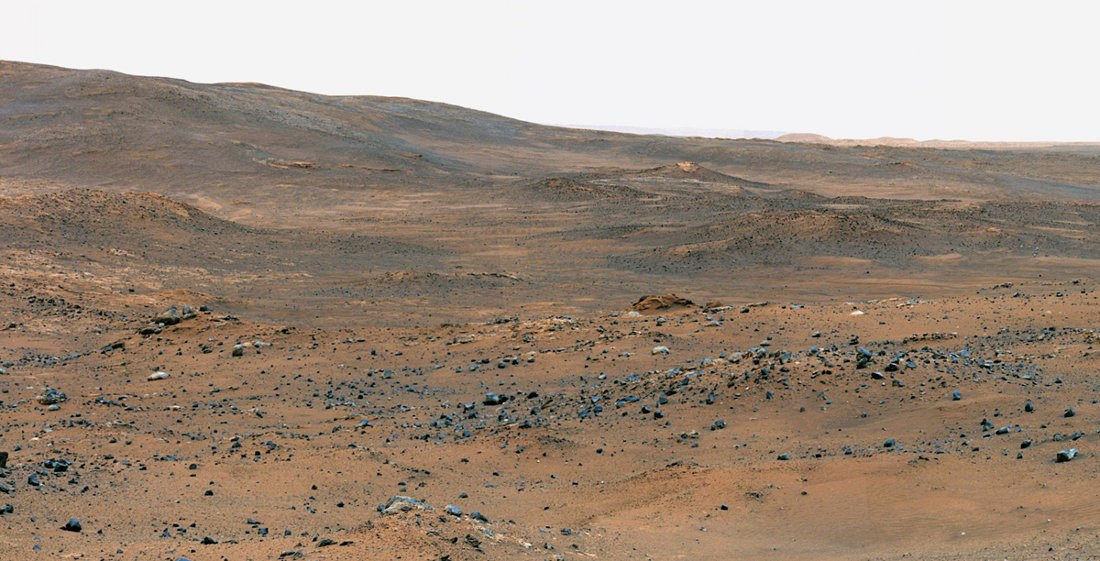
 Source - © 2005 NASA/JPL/Cornell | 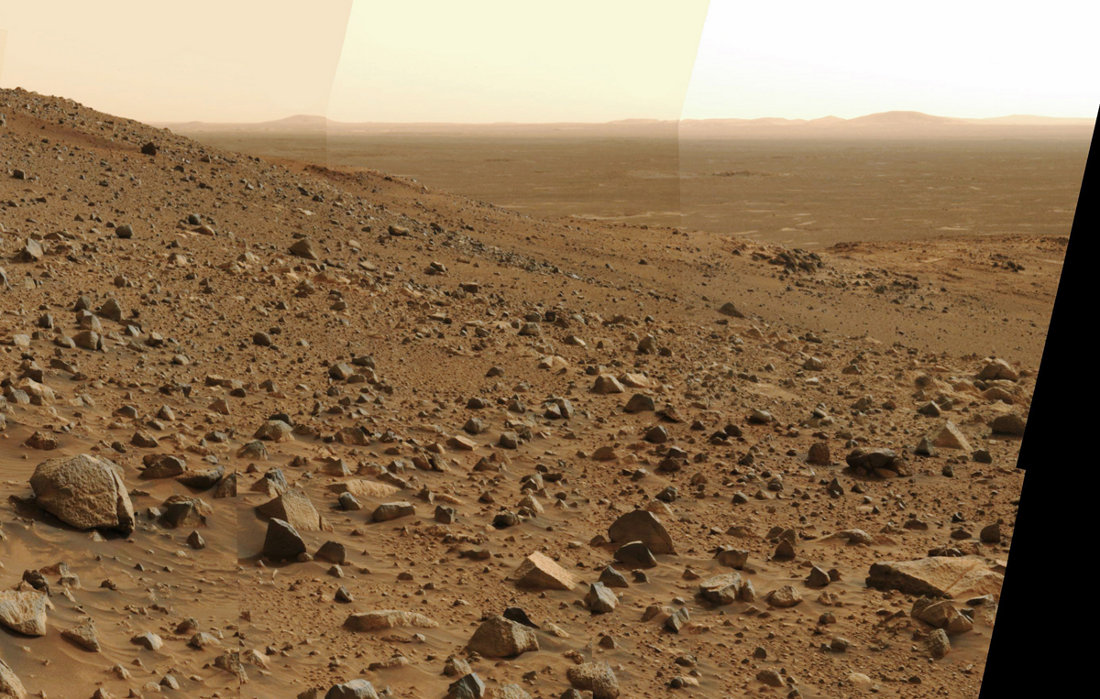 Source - © 2005 NASA/JPL/Cornell Figure 7. En circulant près du sommet des Columbia Hills (19 juin 2005) Au fond, à plus de 40 km, les bords du vaste cratère Gusev au milieu duquel s'est posé Spirit. |
 Source - © 2005 NASA/JPL/Cornell |  Source - © 2005 NASA/JPL-Caltech/Cornell Figure 9. La Tennessee Valley dans les Columbia Hills (23 août 2005) Au premier plan, une mini-dune. |
 Source - © 2005 NASA/JPL/Cornell | 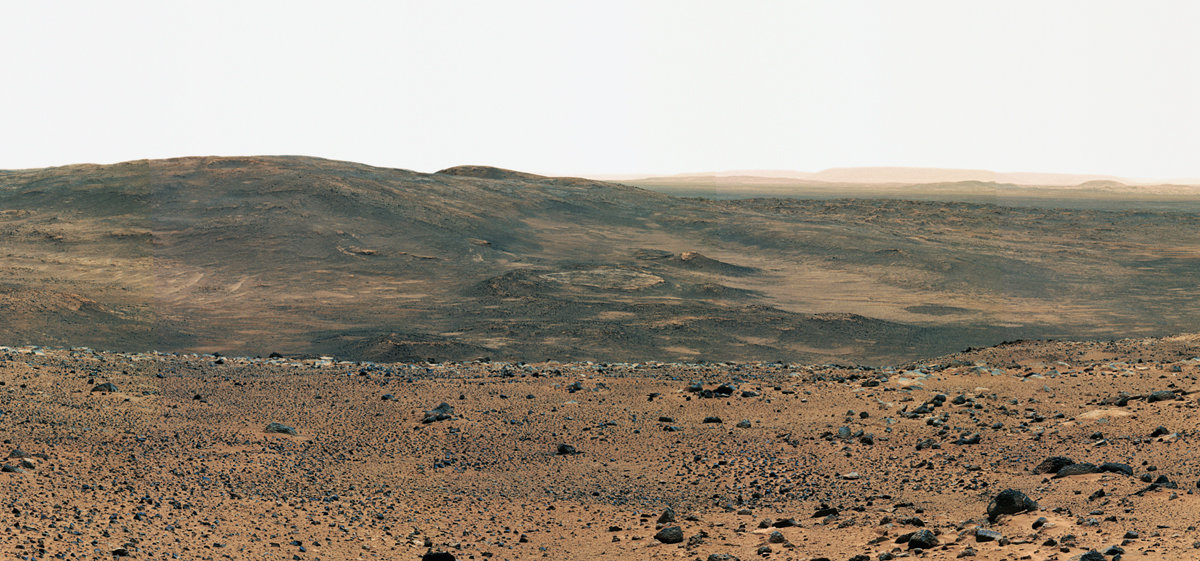 Source - © 2005 NASA/JPL-Caltech/Cornell Figure 11. Vue en direction de Home Plate, depuis le sommet des Columbia Hills (24-26 aoû 2005) Home Plate est l'affleurement circulaire fait de roches claires vers lequel va se diriger Spirit. |
 Source - © 2005 NASA/JPL/Cornell | 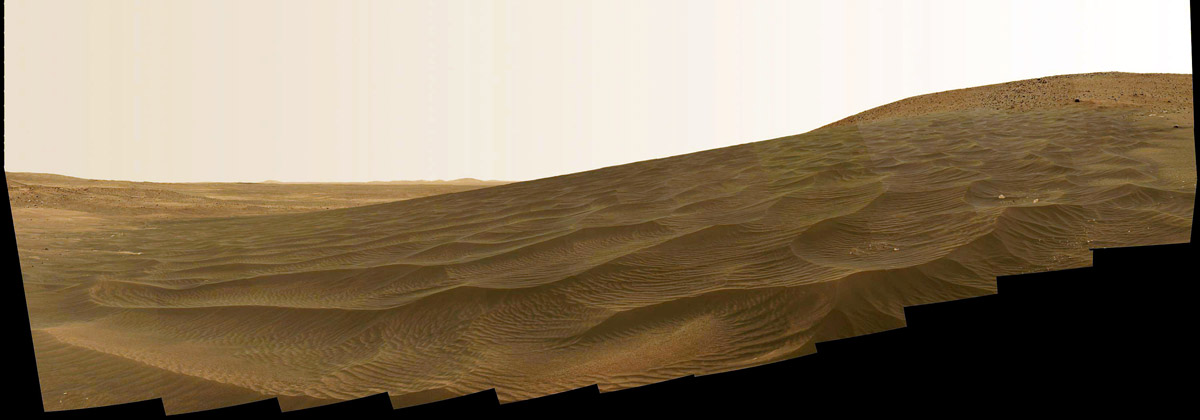 Source - © 2006 NASA/JPL-Caltech/Cornell |
 Source - © 2006 NASA/JPL-Caltech/USGS/Cornell Univ. Figure 14. Au pied de Home Plate (9-12 février 2006) C'est un affleurement de cendres volcaniques et de dépôts phréatomagmatiques que Spirit va étudier à fond pendant des mois et au pied duquel il va "mourir" trois ans plus tard. | 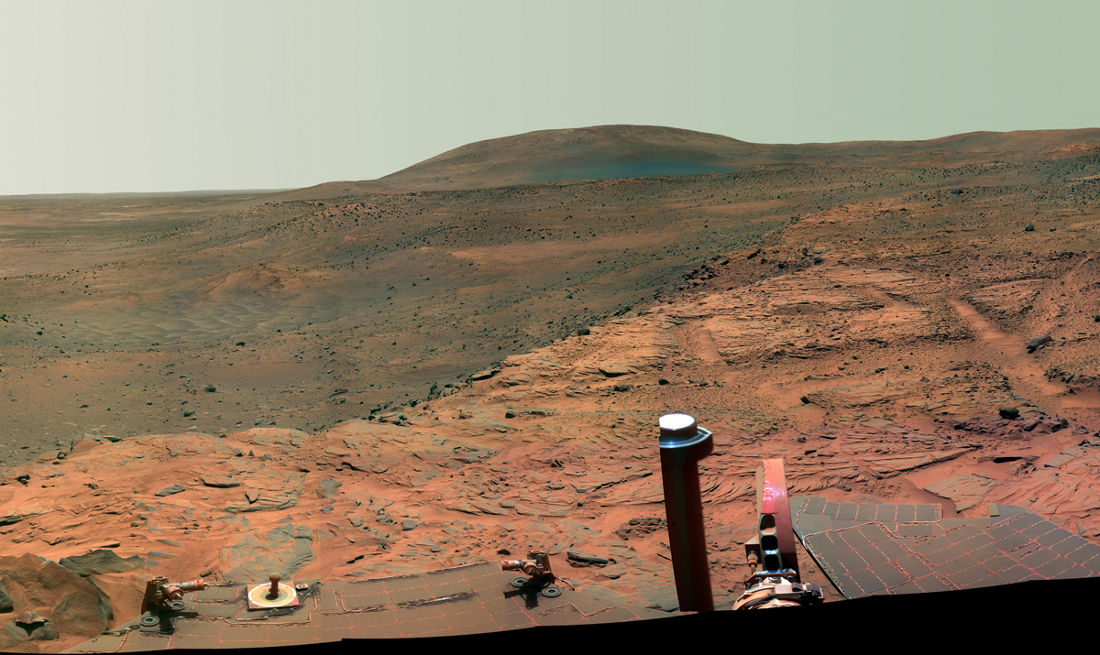 Source - © 2008 NASA/JPL-Caltech/Cornell Univ. |
 Source - © 2008 NASA/JPL-Caltech/Cornell Univ. |  Source - © 2009 NASA/JPL-Caltech/Cornell Univ. Figure 17. Au pied de Home Plate, près du rocher Troy (14 mai - 20 juin 2009) Cette mosaïque (panorama "Calypso" en « fausses couleurs ») a été faite avec des images prises là où Spirit s'est coincé en mai 2009 et où il est "mort" en mars 2010. |
Opportunity, deuxième rover de la mission Mars Exploration Rover
Nous vous montrons 21 panoramas d'Opportunity. Pour en savoir plus sur Opportunity, ses résultats et l'interprétation des images présentées ici, aller sur les sites source de la NASA, ou sur l'un des nombreux articles du dossier Exploration de Mars par sondes et robots consacrés, du moins en partie, à ce robot, la date des prises de vue permettant de retrouver les articles correspondant à ces images.
 Source - © 2004 NASA/JPL/Cornell Figure 18. Le cratère Endurance, de 130 m de diamètre (14 septembre 2004) Opportunity va rentrer, puis ressortir de ce cratère après plusieurs mois de travail. La falaise nommée Burns Cliff des deux images suivantes correspond aux bords gauches du cratère. | |
 Source - © 2004 NASA/JPL/Cornell | 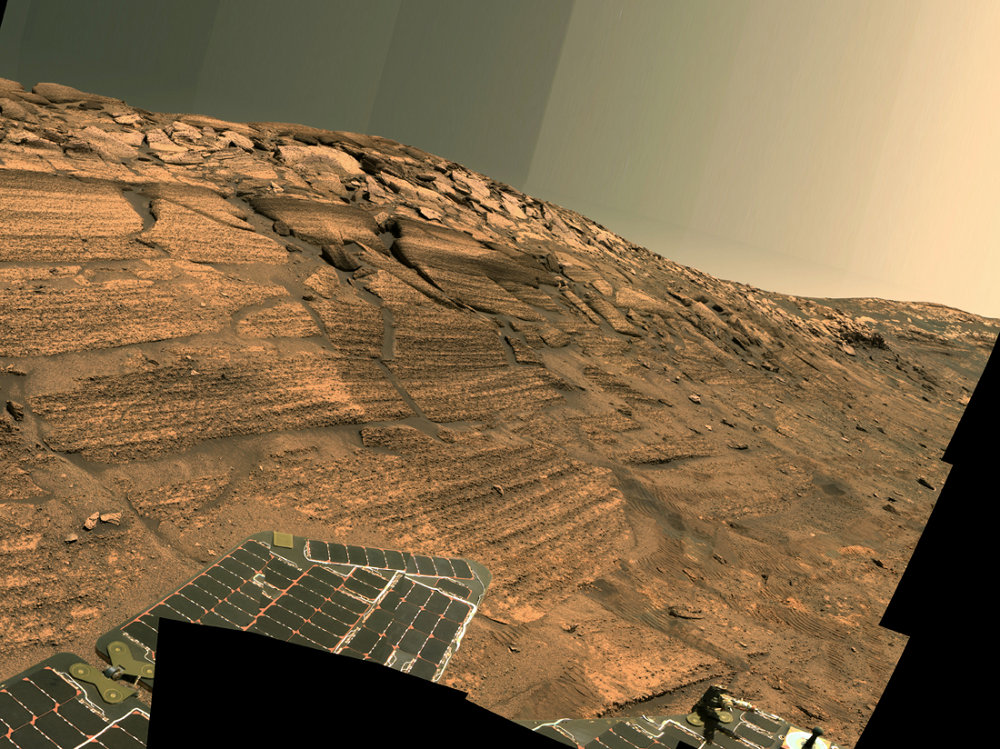 Source - © 2004 NASA/JPL/Cornell |
 Source - © 2005 NASA/JPL-Caltech/Cornell Un peu de sable et des mini-dunes posées sur les sédiments "craquelés" omniprésents dans Méridiani Planum. | 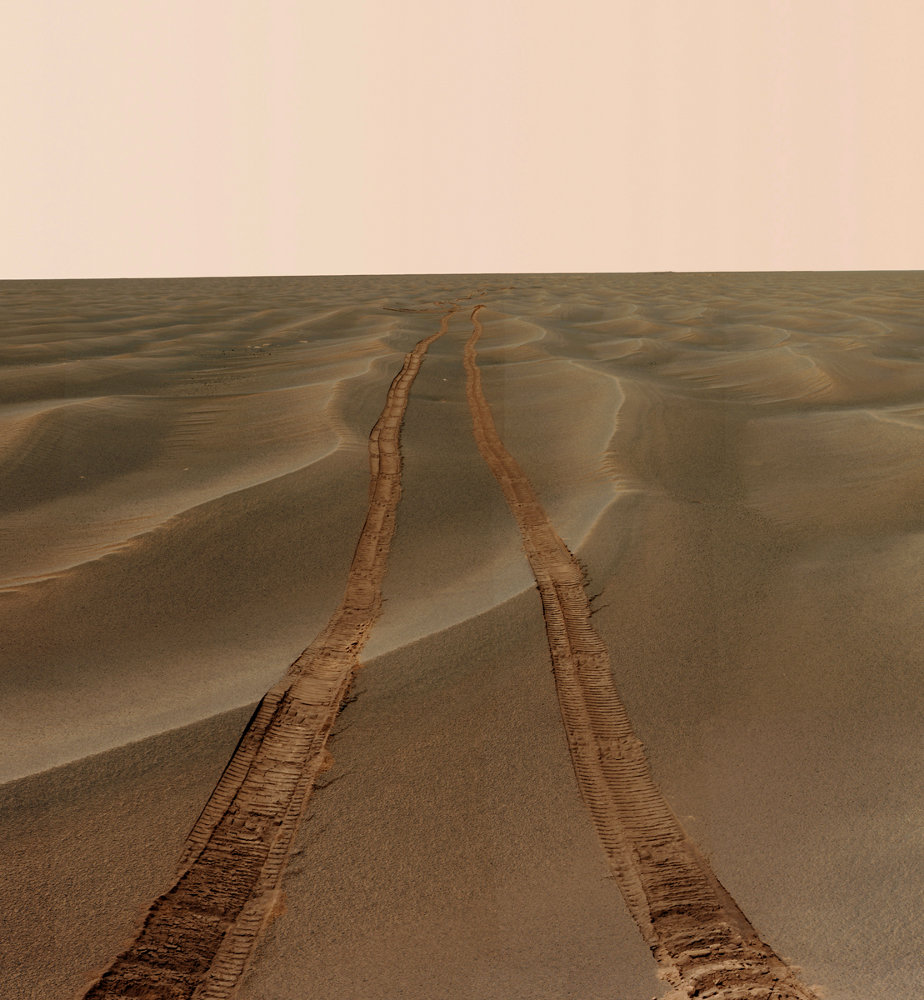 Source - © 2005 NASA/JPL/Cornell |
 Source - © 2006 NASA/JPL-Caltech/USGS/Cornell Univ. | 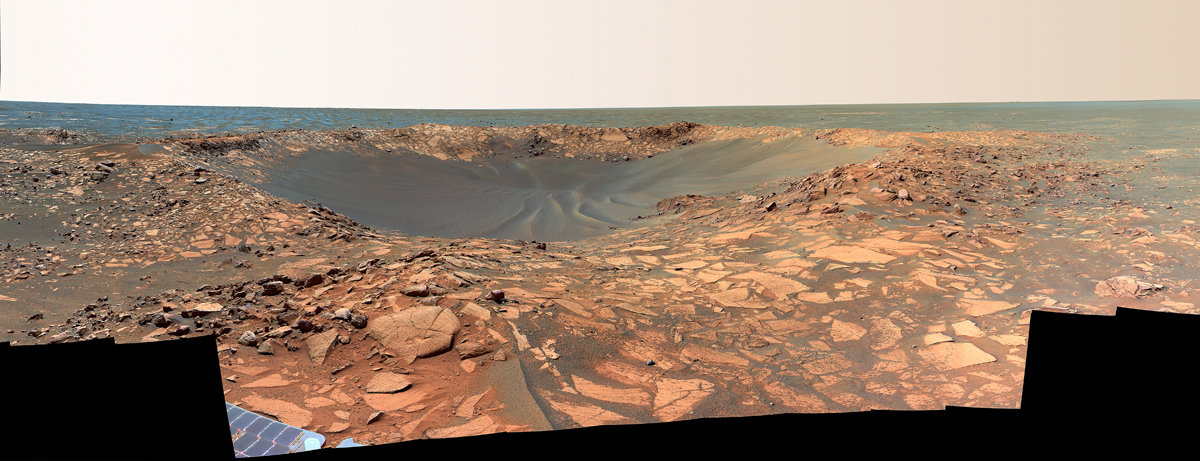 Source - © 2006 NASA/JPL-Caltech/Cornell/UNM |
 Source - © 2007 NASA/JPL-Caltech/Cornell | 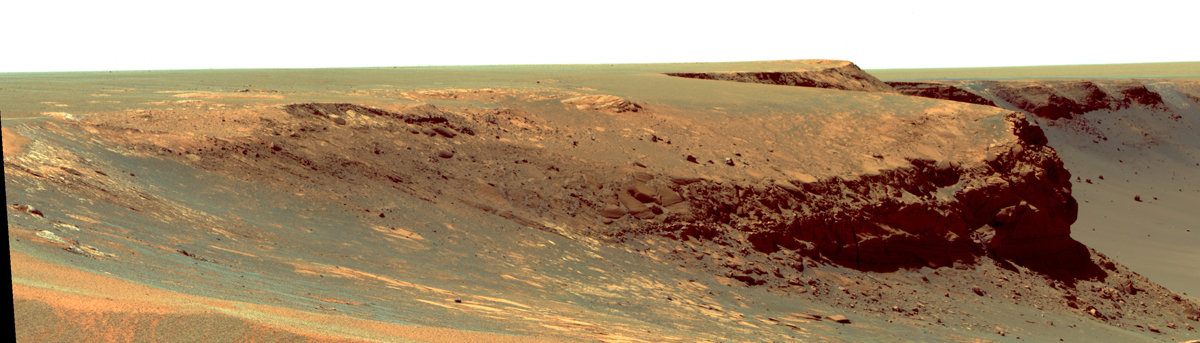 Source - © 2006 NASA/JPL/Cornell |
 Source - © 2006 NASA/JPL-Caltech/Cornell | 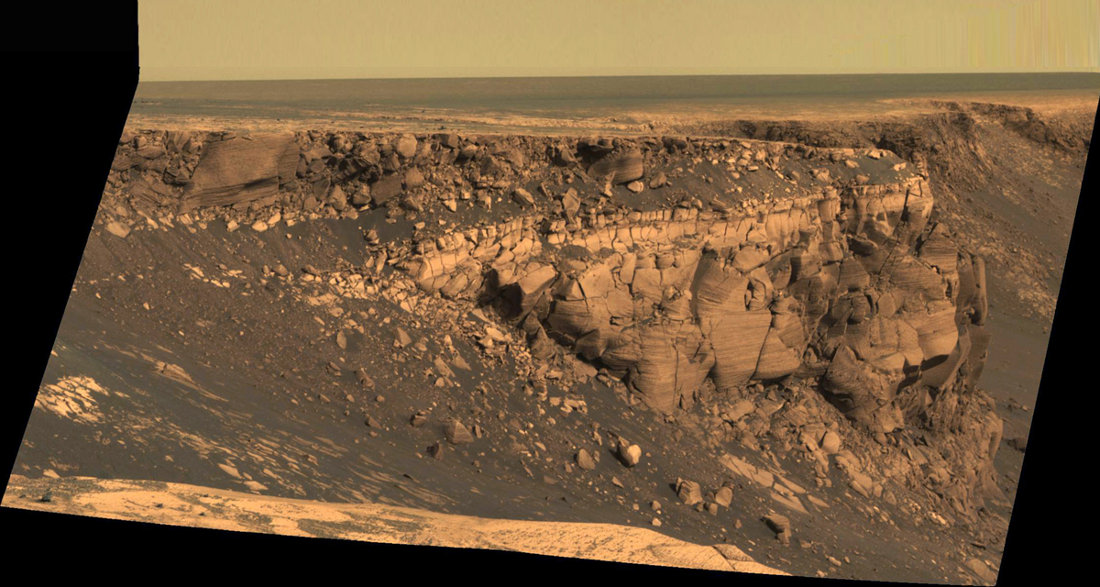 Source - © 2007 NASA/JPL/Cornell |
 Source - © 2009 NASA/JPL/Cornell Univ. Figure 29. Dans la plaine entre les cratères Victoria et Endeavour (21-24 novembre 2008) Des dunes sur les sédiments de Méridiani Planum. Panorama nommé Santorini. |  Source - © 2010 NASA/JPL-Caltech Figure 30. Réseau de dunes parallèles dans la plaine entre les cratères Victoria et Endeavour (24-30 août 2010) Coloration « artisanale ». |
 Source - © 2010 NASA/JPL-Caltech/Cornell Univ. | 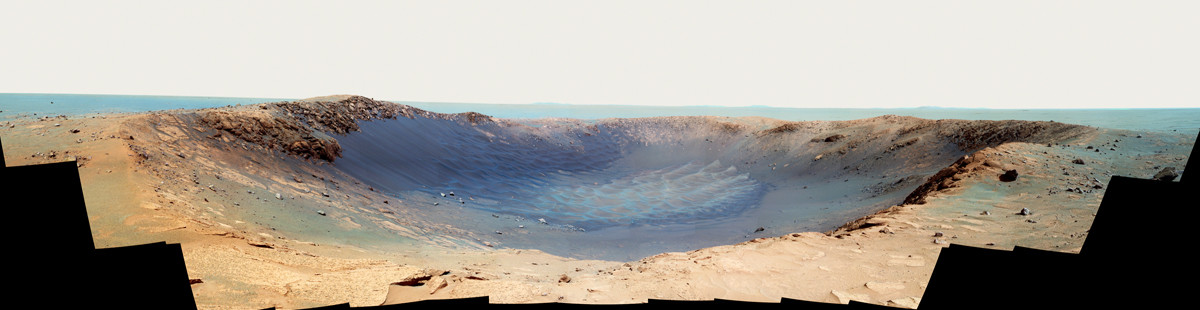 Source - © 2011 NASA/JPL-Caltech/Cornell/ASU |
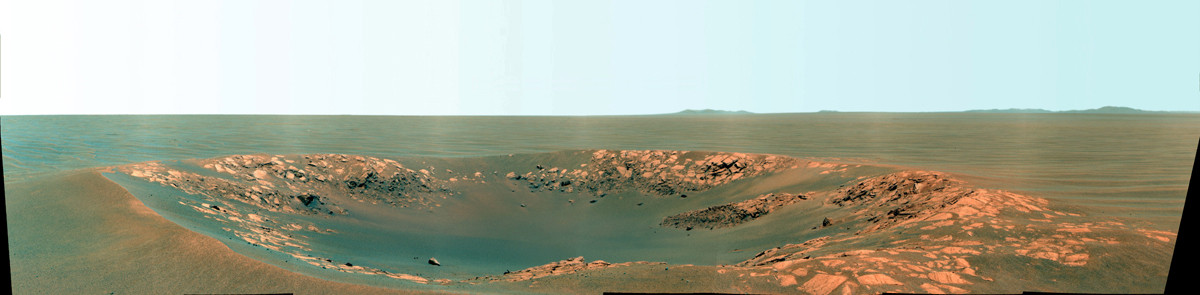
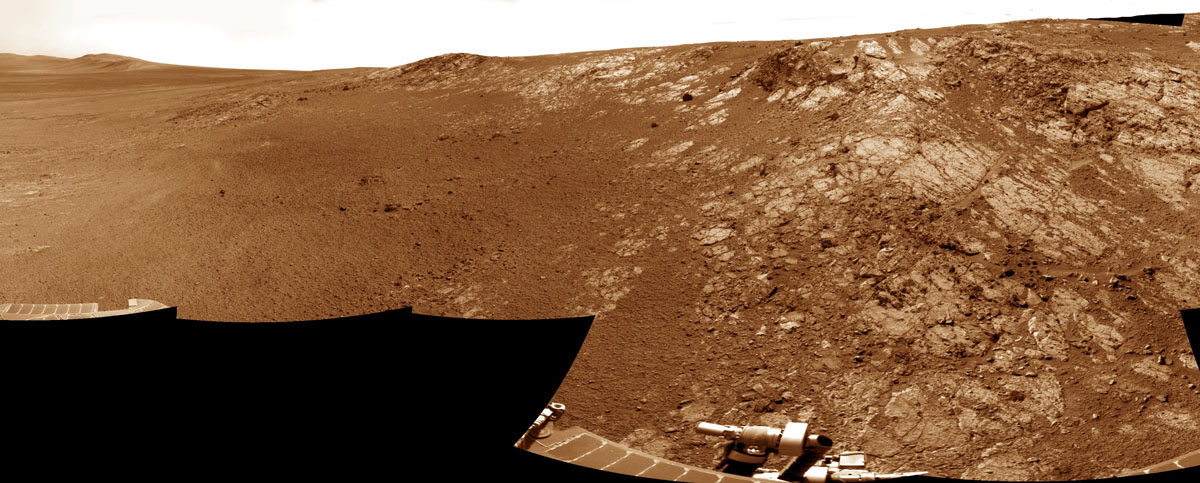
 Source - © 2011 NASA/JPL-Caltech/Cornell/ASU Figure 33. Le petit cratère Odyssey sur le rebord du grand cratère Endeavour (9 août 2011) Les montagnes du fond correspondent à l'autre bord du cratère Endeavour, 20 km plus à l'Est. Coloration « artisanale ». |  Source - © 2012 NASA/JPL-Caltech/Cornell/Arizona State Univ. Figure 34. Le rebord Ouest du cratère Endeavour vu du secteur nommé Greeley (décembre 2011 –mai 2012) Au premier plan, le Cape York, un peu plus loin, Solander Point. |
 Source - © 2012 NASA/JPL-Caltech Coloration « artisanale ». | 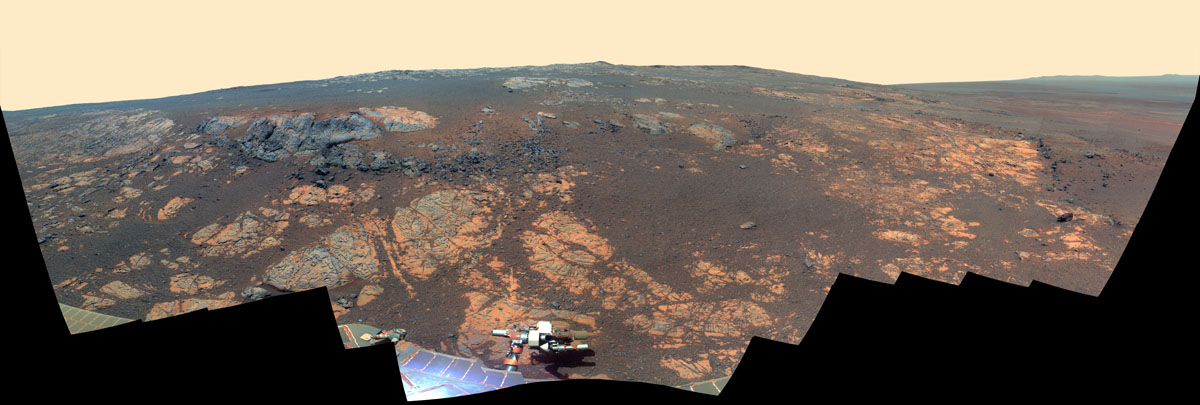 Source - © 2013 NASA/JPL-Caltech/Cornell/Arizona State Univ. |
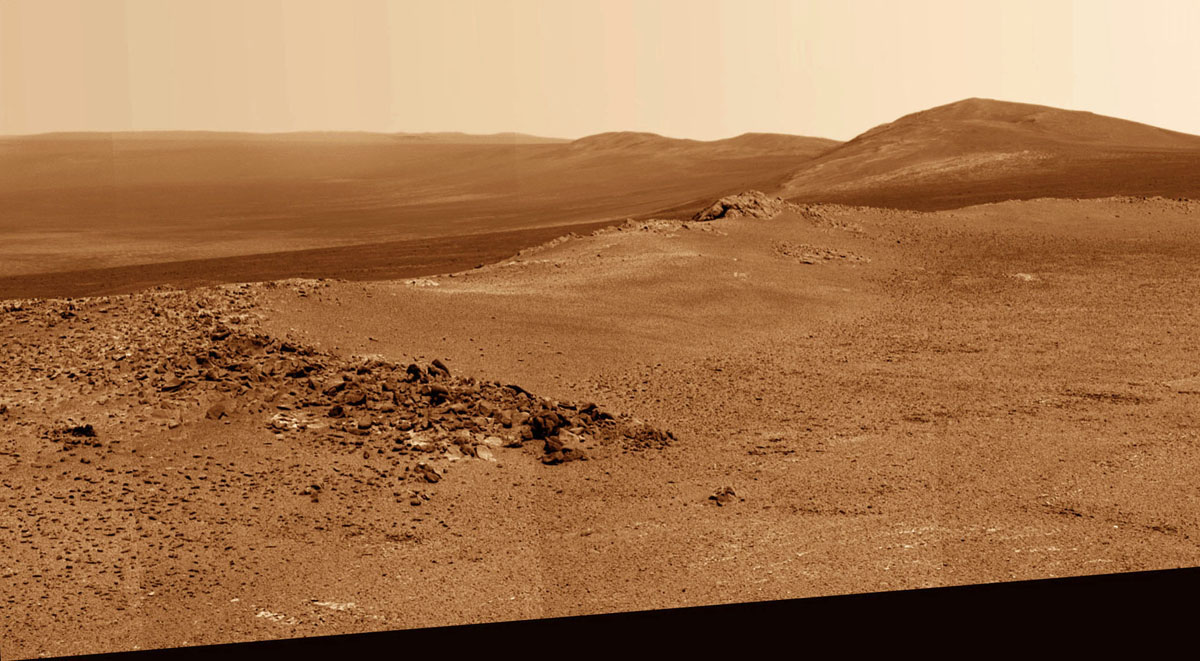 Source - © 2013 NASA/JPL-Caltech/Cornell Univ./Arizona State Univ. Peut-être l'image où l'on appréhende le mieux qu'Endeavour est un cratère de très grandes dimensions. Coloration « artisanale ». | 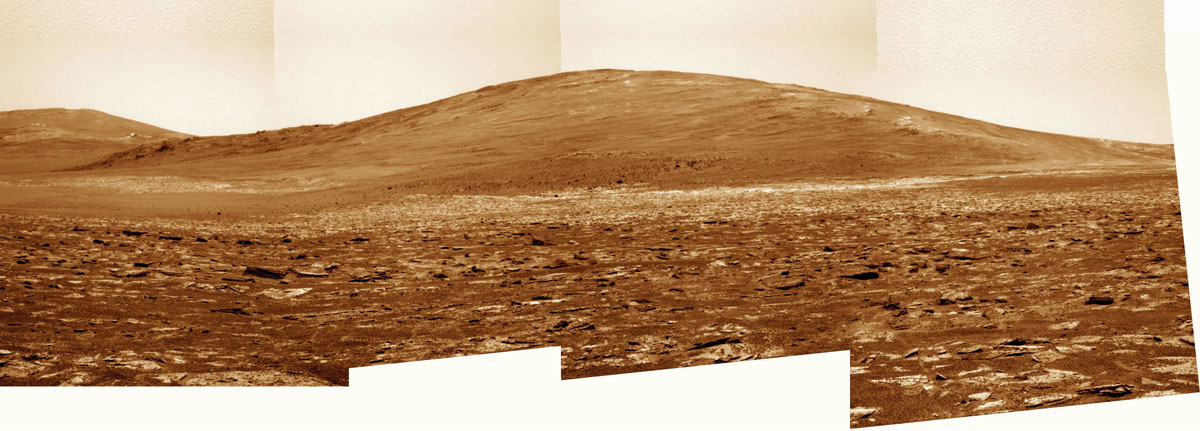 Source - © 2013 NASA/JPL Figure 38. En arrivant au pied de Solander Point sur le rebord Ouest du cratère Endeavour (23 juillet 2013) Mosaïque et coloration « artisanales ». |
Curiosity, mission Mars Science Laboratory
Nous vous montrons 21 panoramas pris par Curiosity. Pour tout savoir sur Curiosity et ses résultats, aller sur les sites sources NASA de chaque image, ou sur l'un des nombreux articles du dossier Exploration de Mars par sondes et robots consacrés, du moins en partie, à ce robot, la date des prises de vue permettant de retrouver les articles correspondant à ces images. La mission n'étant qu'à peine commencée en août 2013, on peut espérer que de nombreux nouveaux panoramas suivront.
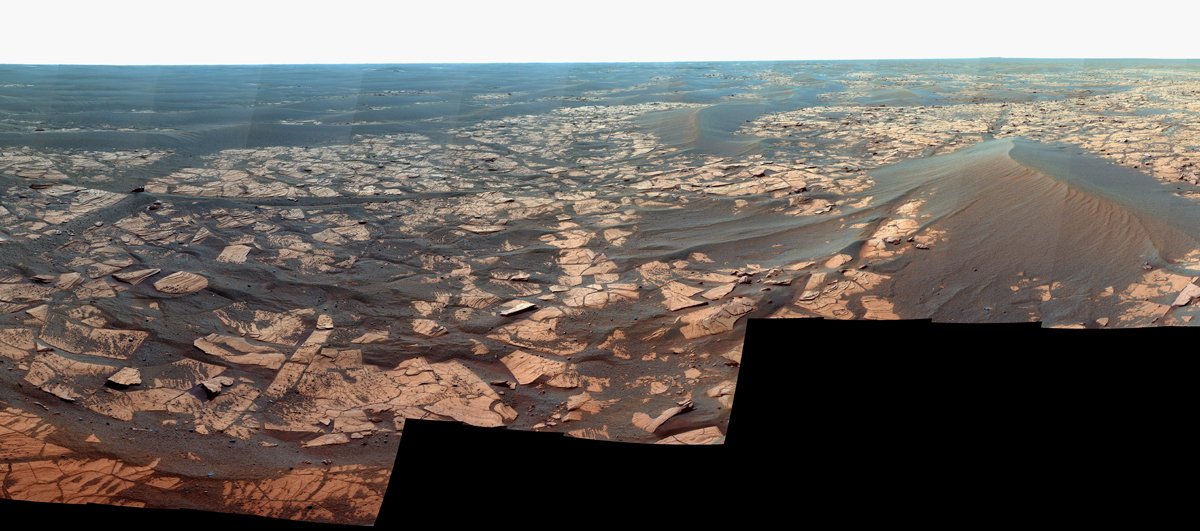
Source - © 2012 NASA/JPL-Caltech/MSSS

Source - © 2012 NASA/JPL-Caltech/MSSS
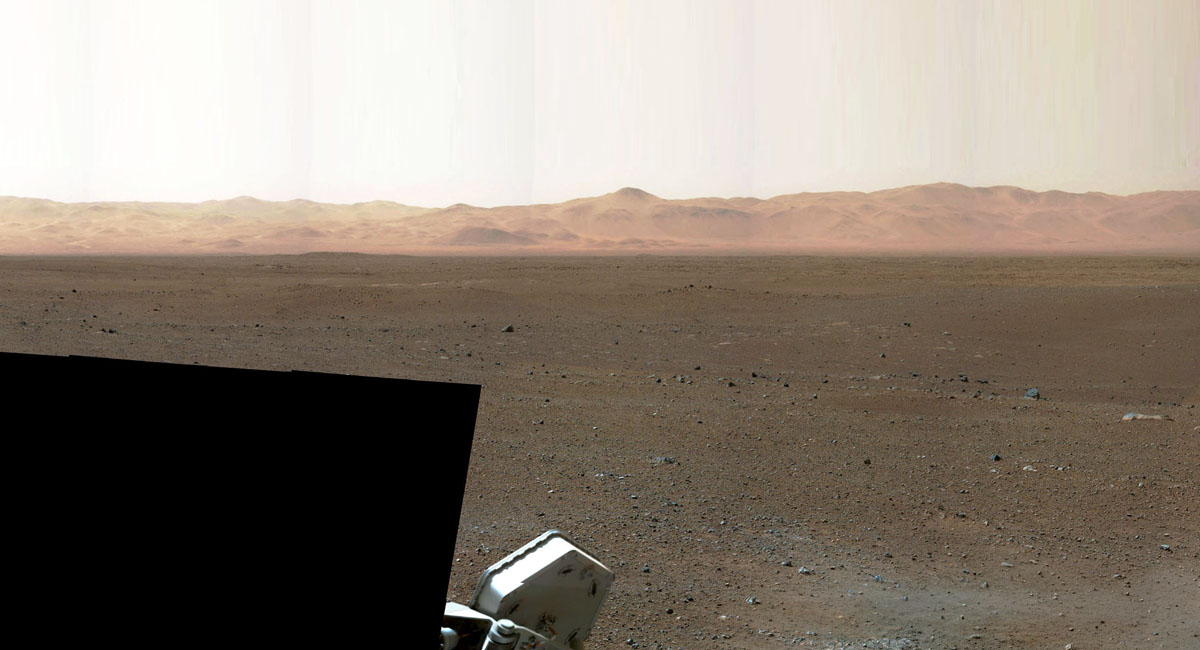
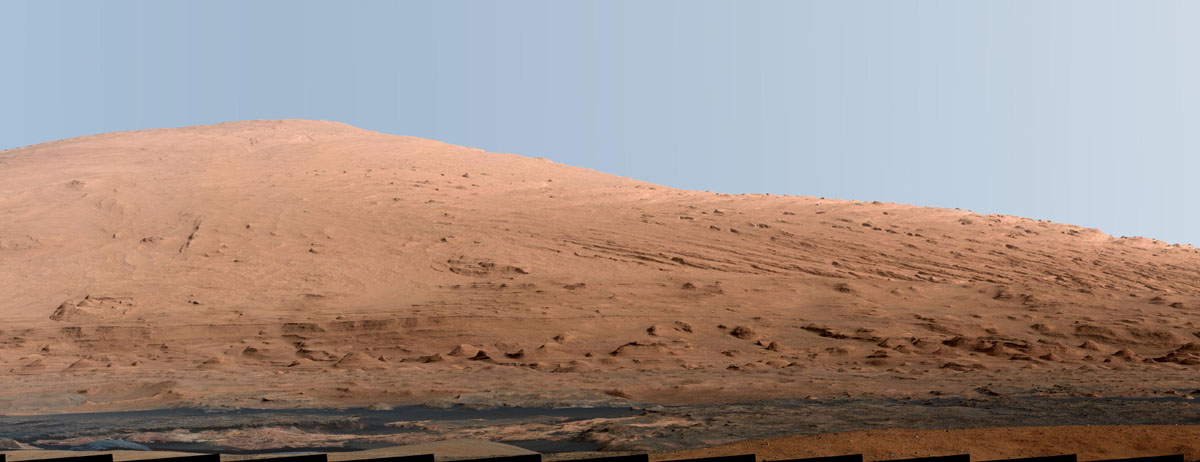
Figure 40. Le Mont Sharp vu depuis le site d'atterrissage de Curiosity (8 au 18 août 2012)
Le sommet, situé à 20 km de Curiosity, domine la plaine de 5000 m. La bande noire correspond à un cordon de dunes constituées de sable sombre.
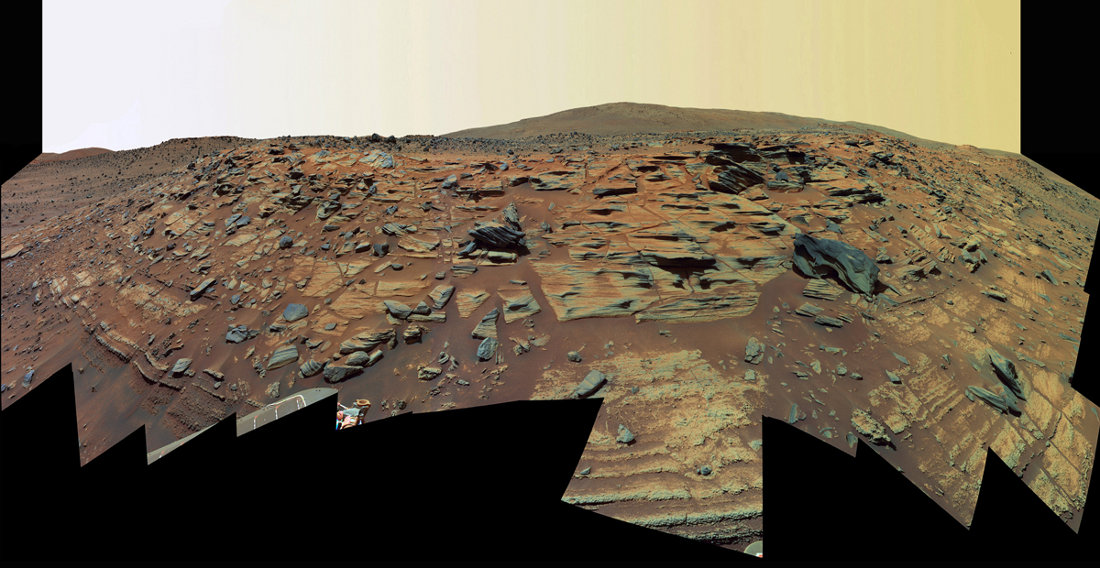
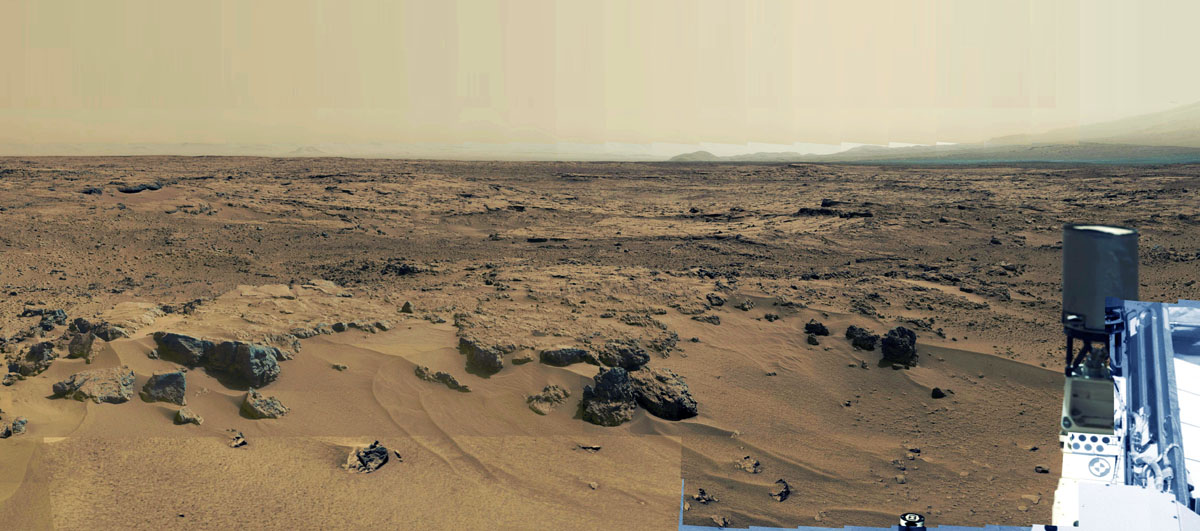
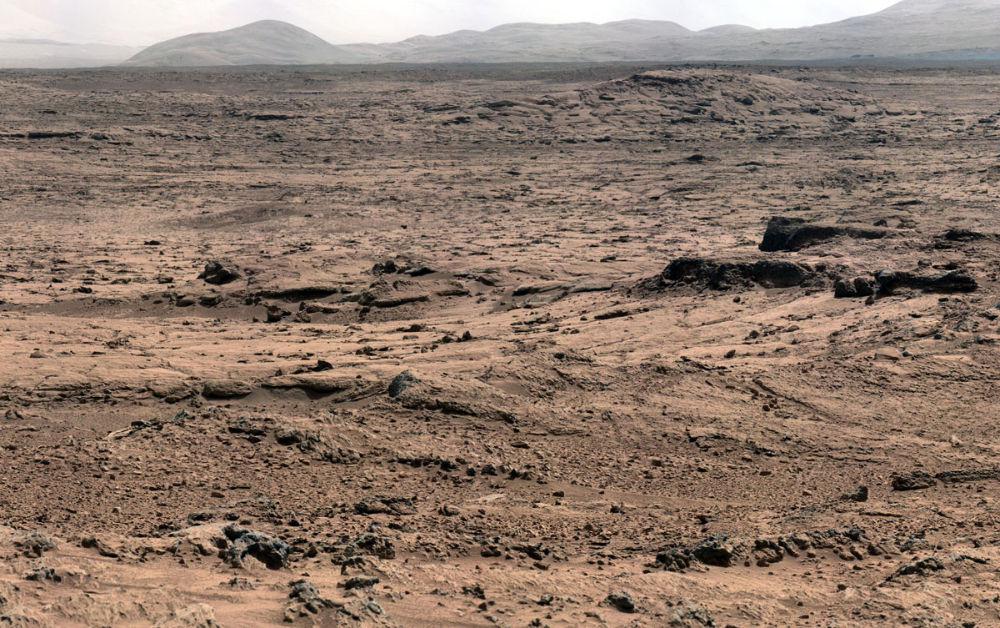 Source - © 2012 NASA/JPL-Caltech/MSSS Figure 41. Depuis le site nommé Rocknest, vue prise en direction de l'Est (octobre-novembre 2012) Au fond à droite, le début du flanc Nord du Mont Sharp. |  Source - © 2012 NASA/JPL-Caltech/MSSS Figure 42. Depuis le site nommé Rocknest, vue prise en direction du Nord (octobre-novembre 2012) Au fond, le bord du cratère Gale. |
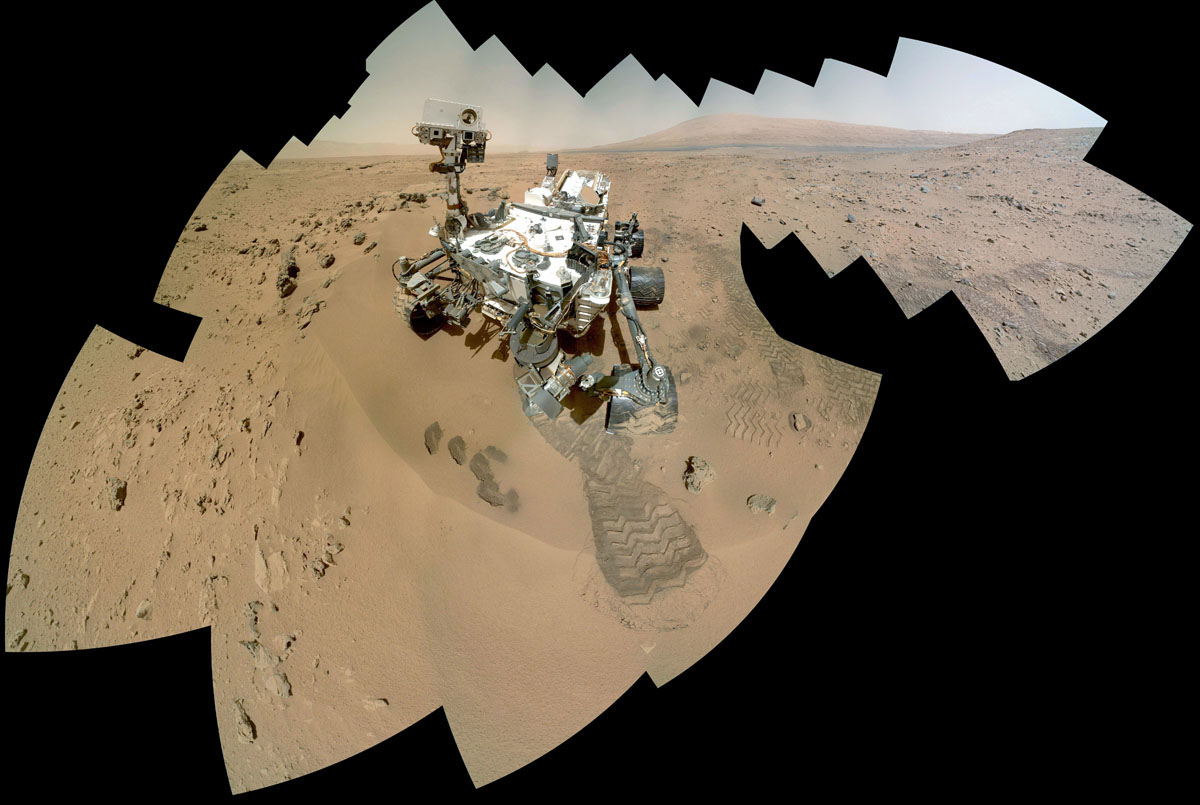 Source - © 2012 NASA/JPL-Caltech/MSSS Figure 43. Autoportrait de Curiosity sur le site nommé Rocknest (31 octobre – 1er novembre 2012) Au fond, le Mont Sharp. |  Source - © 2012 NASA/JPL-Caltech / NASA/JPL-Caltech/MSSS |
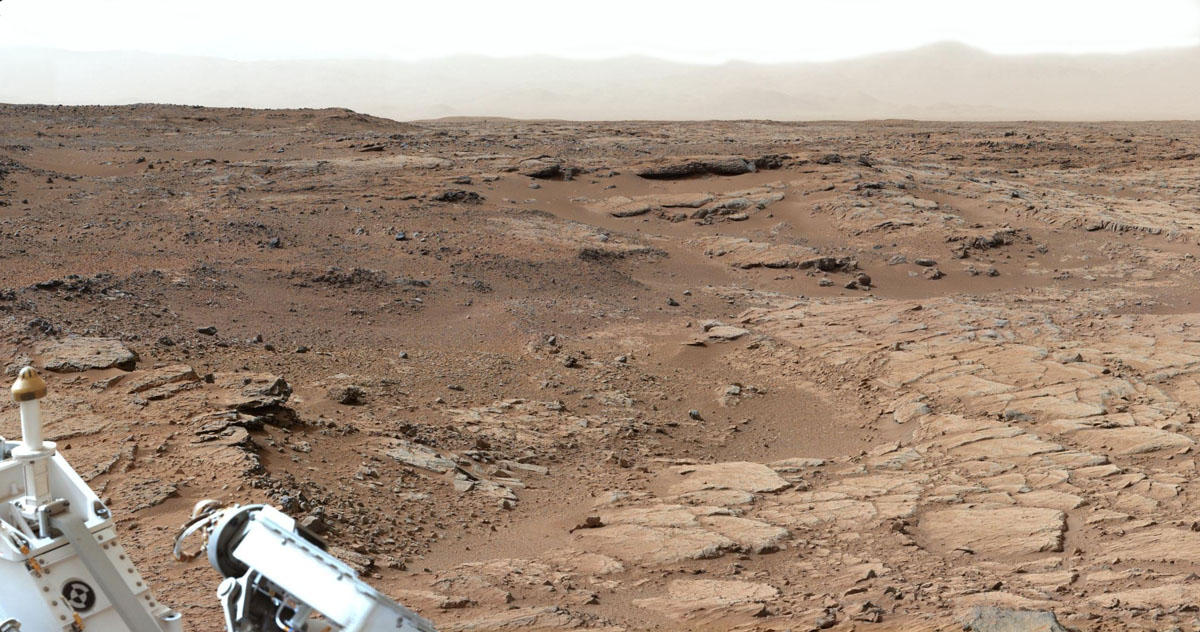 Source - © 2012 NASA/JPL-Caltech/MSSS Figure 45. Vue prise vers le Nord depuis le site nommé Point Lake (22 novembre 2012) Au premier plan, ces curieuses dalles craquelées que l'on trouve abondamment dans le secteur de Yellowknife Bay. |  Source - © 2012 NASA/JPL-Caltech/MSSS / NASA/JPL-Caltech/MSSS Figure 46. Vue prise vers le Sud depuis le site nommé Point Lake (22 novembre et 18 août 2012) Au premier plan, ces curieuses dalles craquelées que l'on trouve abondamment dans le secteur de Yellowknife Bay. Au fond, le Mont Sharp. Entre les deux, ce cordon de dunes de sable sombre qui va obliger Curiosity à un grand détour pour gagner la base du Mont Sharp, son objectif principal. Mosaïque « artisanale ». |
 Source - © 2013 NASA/JPL-Caltech/MSSS Les quatre figures suivantes correspondent à quatre zooms détaillant, entre autres, les strates basales du Mont Sharp, strates qui représentent le but principal de la mission MSL – Curiosity. | |
 Source - © 2013 NASA/JPL-Caltech/MSSS | 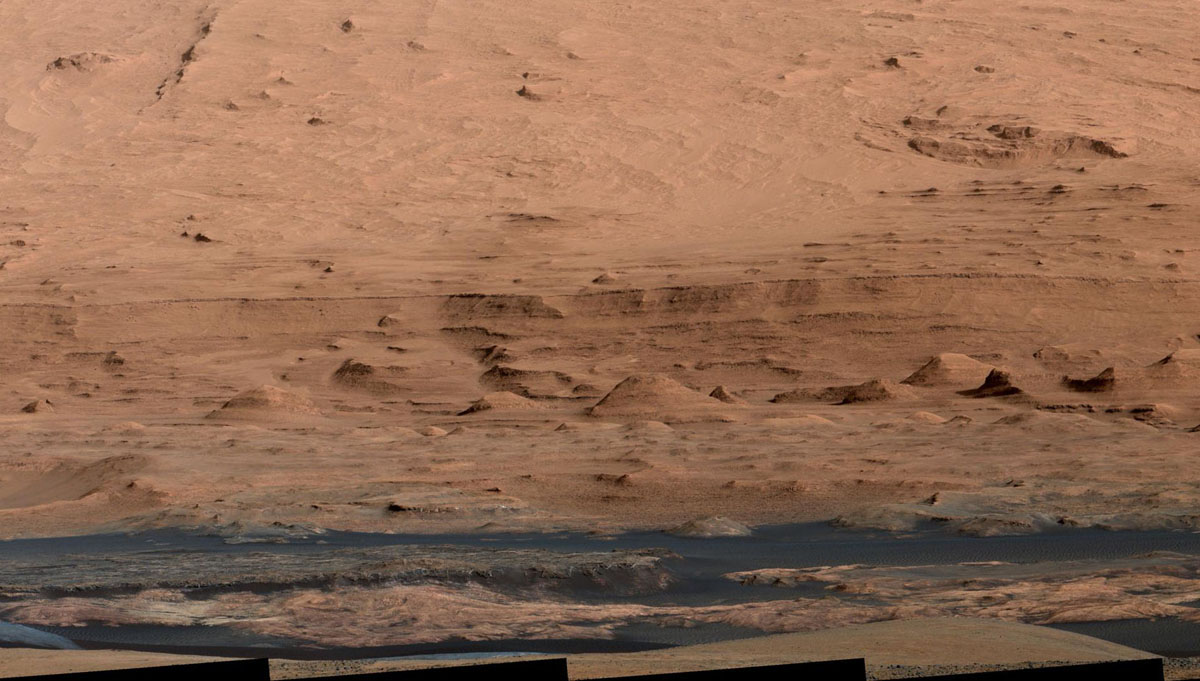 Source - © 2013 NASA/JPL-Caltech/MSSS |
 Source - © 2013 NASA/JPL-Caltech/MSSS |  Source - © 2013 NASA/JPL-Caltech/MSSS |
 Source - © 2013 NASA/JPL-Caltech/MSSS |  Source - © 2013 NASA/JPL-Caltech/MSSS Mosaïque artisanale réalisée à partir de 4 images du sol 141. |
 Source - © 2013 NASA/JPL-Caltech Coloration « artisanale ». | 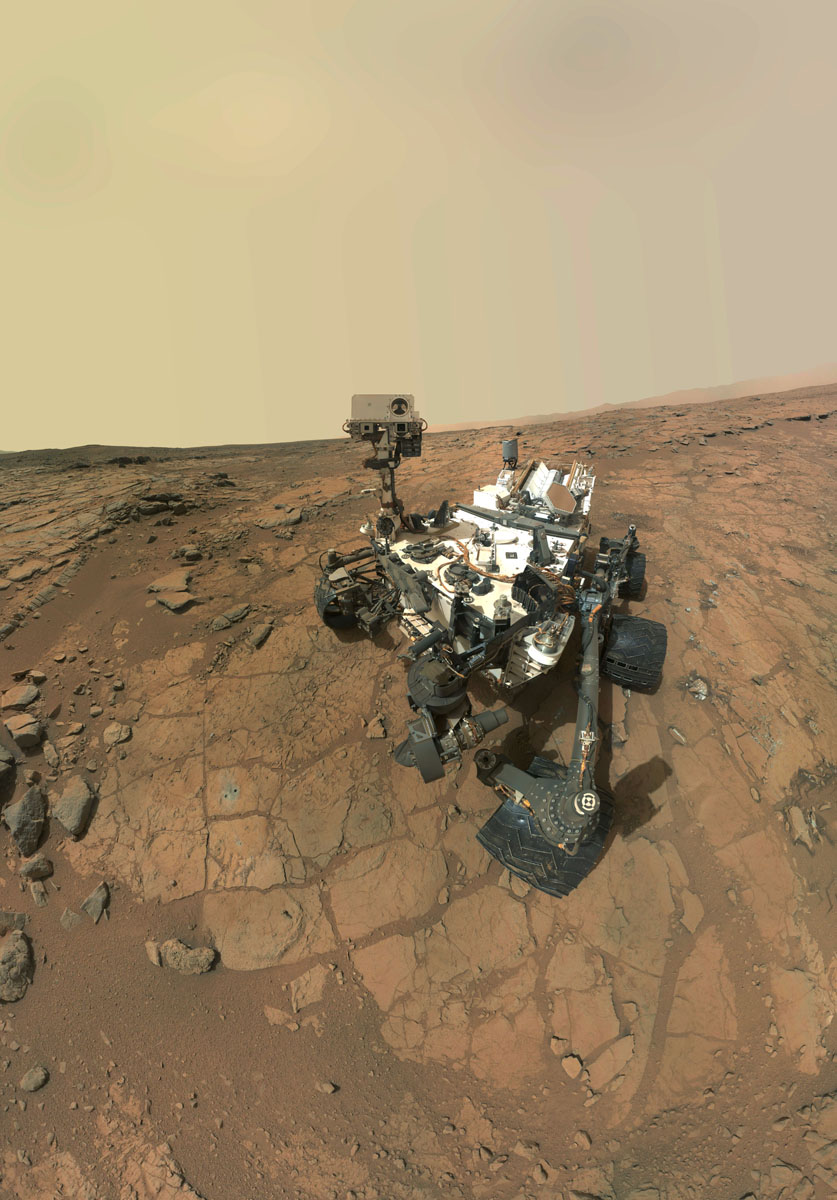 Source - © 2013 NASA/JPL-Caltech/MSSS Figure 55. Autoportrait de Curiosity sur le site John Klein (3 février et 10 mai 2013) Les deux petits "points verts" au centre gauche inférieur de l'image correspondent aux deux premiers forages. |
 Source - © 2013 NASA/JPL-Caltech/MSSS Figure 56. Vue générale de l'affleurement nommé Point Lake (20 février 2013) Mosaïque « artisanale » de 4 images prises par les caméras du mât (Mastcam), le sol 193. | 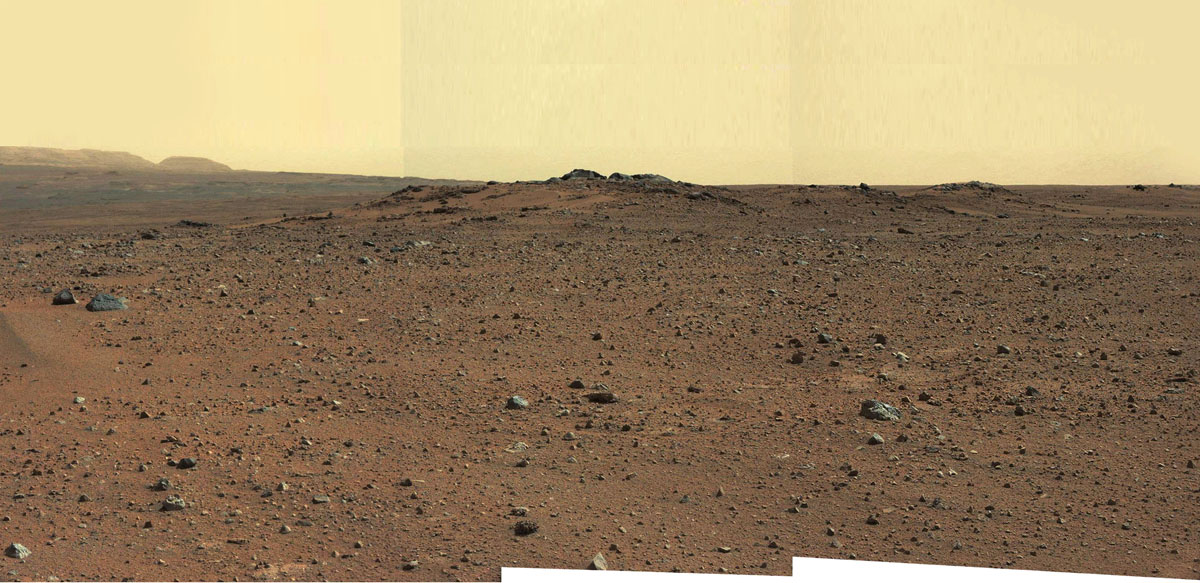 Source - © 2013 NASA/JPL-Caltech/MSSS Mosaïque « artisanale » de 3 images du sol 342. |
 Source - © 2013 NASA/JPL-Caltech/MSSS Figure 58. La base Ouest du Mont Sharp (26 août 2013) Mosaïque « artisanale » d'images du sol 375. | 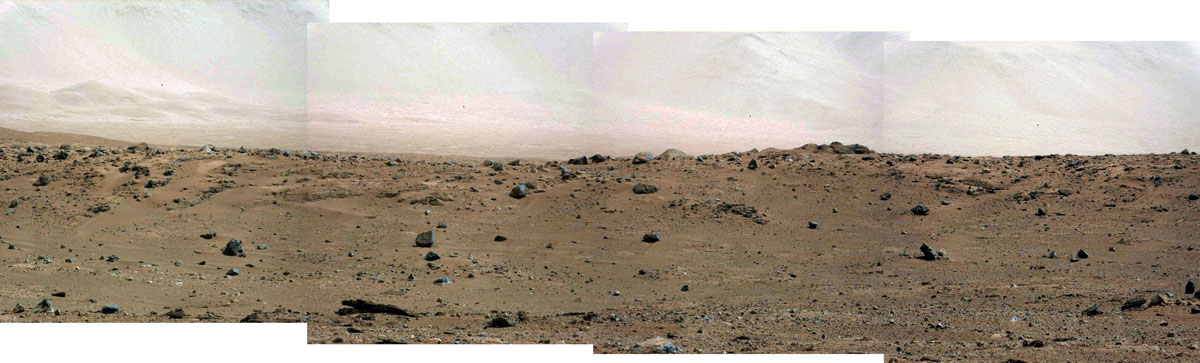 Source - © 2013 NASA/JPL-Caltech/MSSS La brume est essentiellement composée de fines poussières (comme dans les déserts terrestres), et non pas de micro-gouttelettes d'eau comme c'est souvent le cas sous nos climats tempérés. Mosaïque « artisanale » d'images du sol 385. |
 Source - © 2013 NASA/JPL-Caltech/MSSS Figure 60. Vue sur le cordon de dune de sable noir à la base Nord du Mont Sharp (4 septembre 2013) Ce cordon dunaire oblige le robot à faire un détour de 8 km pour atteindre son but, la base du Mont Sharp. Mosaïque « artisanale » d'images du sol 384. |  Source - © 2013 NASA/JPL-Caltech/MSSS Figure 61. Détail sur le cordon de dune de sable noir et sur la base Nord du Mont Sharp (7 septembre 2013) Ce cordon dunaire oblige le robot à faire un détour de 8 km pour atteindre son but, la base du Mont Sharp. Zoom la partie "centre droit" de l'image précédente, pris 3 sols plus tard, alors que Curiosity a progressé d'environ 150 m vers le Sud-Ouest. Mosaïque « artisanale » d'images du sol 387. |



