Article | 18/12/2000
Exploitation de données GPS : cinématique des plaques Inde et Eurasie
18/12/2000
Résumé
Les mouvements relatifs de l'Inde par rapport à l'Eurasie révélés par GPS, déformation au niveau de l'Himalaya.
Table des matières
d'après Larson et al., India-Eurasian kinematics from GPS, vol. 104, n°. B1, pages 1077-1093, Journal of Geophysical Research, 1999.
Quelques précisions à propos des données GPS et NUVEL1
Les données GPS permettent d'obtenir le mouvement absolu d'une station sur la sphère terrestre. Ces données GPS apportent donc une information cinématique locale, à l'échelle de la station.
Contrairement à ces données, les modèles basés sur des données géologiques sont utilisés pour estimer les vitesses absolues puis relatives à l'échelle de la plaque. Ainsi, le modèle géologique NUVEL1 (DeMets et al., 1990 ; 1994) fait office de référence et synthétise les déplacements absolus et relatifs des plaques asssimilées à des blocs rigides. C'est un modèle tectonique cohérent pour l'ensemble des plaques et qui moyenne les déplacements mesurés sur 3 millions d'années, en inversant les données cinématiques des océans.
Les données GPS sont plus volontiers utilisées pour évaluer la cinématique des zones de déformation, à la jonction entre deux plaques. Lors de la convergence entre deux plaques, une partie du mouvement se fait par coulissement de la plaque subductante sous la plaque chevauchante, l'autre par un raccourcissement qui accomode ainsi la convergence.
Un exemple caractéristique est celui de l'Himalaya, pour lequel un important travail d'acquisition GPS a été réalisé sur 6 ans (Larson et al., 1999). L'exercice suivant montre comment les données GPS permettent d'approcher les mécanismes de déformation à la frontière entre 2 plaques.
 Source - © 1999 USGS Figure 1. Dérive de la plaque indienne |  Source - © 1999 USGS Figure 2. La collision actuelle |  Source - © 1999 USGS Figure 3. La collision en coupe |
Un exemple de TD sur la collision Inde-Asie à partir des données GPS
Les 30 stations de ce réseau GPS vont permettre d'analyser la déformation active à la frontière Inde-Eurasie.
 Figure 4. Localisation des stations |  Figure 5. Déplacements absolus mesurés par GPS |
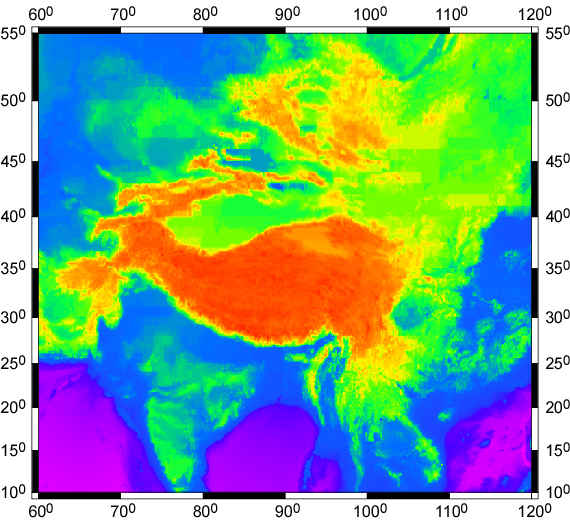 Figure 7. Carte topographique |  Figure 8. Zone plus détaillée |
Dans cet exercice, on ne considérera que la composante horizontale des mouvements enregistrés.
Q0 : Sur la carte topographique ci-dessus, placez quelques stations GPS.
Q1 : Avec le programme Plate Motion Calculator, estimez une vitesse absolue moyenne NUVEL1 pour la plaque Inde. Reportez-la graphiquement sur la carte topographique, au centre du continent indien.
Q2 : Pour la plaque Inde, comparer les vitesses absolues des stations mesurées par GPS et calculées par NUVEL1.
Q3 : L'Himalaya est la zone d'affrontement entre les plaques Inde et Asie. Dans cette zone de déformation, les vitesses absolues GPS sont moins grandes que celles prédites par NUVEL1 pour l'Inde. Qu'en déduisez-vous ? Réponse.
Q4 :On s'intéresse maintenant à la distribution de la déformation dans la zone de collision. Déterminer pour quelques stations le vecteur mouvement relatif (composante Nord et composante Est) en prenant l'Asie comme référentiel fixe, de manière à faire « monter » l'Inde vers le Nord. Réponse.
Q5 : Après avoir calculé ces vecteurs relatifs pour quelques stations, représentez les sur la carte topographique, en prenant comme origine les coordonnées des stations.
Q6 : Qu'en déduisez-vous ? Réponse.
Réponses
Réponse Q2-Q3 : Vitesses GPS absolues
On en déduit que la collision se fait en s'amortissant vers le Nord. Cela montre qu'on peut discuter qualitativement l'hypothèse NUVEL1 des plaques rigides, particulièrement aux frontières de plaques. retour.
Figure 9. Résultats : vitesses GPS absolues
Réponse Q4 : Calcul de vitesses relatives
Rappellons que les vitesses GPS sont des vitesses absolues. Elles permettent de mesurer le décalage entre la vitesse d'une station GPS, quelque soit sa localisation et la vitesse d'une plaque supposée rigide.
Si une plaque A a un mouvement absolu de 5 cm/an vers le NE, et que la plaque B située plus au Nord se déplace aussi vers le NE avec un vitesse absolue de 5 cm/an, le mouvement relatif est nul.
Pour connaitre le mouvement relatif des 2 plaques, il est donc nécessaire de soustraire le mouvement de la plaque A à celui de la plaque B . Si le mouvement de la plaque B n'est plus que de 2 cm/an vers le NE, alors la vitesse relative d'un point que la plaque A par rapport à la plaque B est de 5-2 = 3 cm/an.
En réalité, le raisonnement se complique un peu puisque les déplacements se font sur une sphère. Les plaques se déplacent autour d'un pôle de rotation dit d'Euler, avec une vitesse angulaire.
Figure 10. Déplacements sur une sphère
Les données du modèle NUVEL1, moyennées sur 3 Ma, fournissent les vitesses tangentielles en tout point. Il est clair que un point éloigné du pôle de rotation aura une vitesse tangentielle plus élevée que celle d'un point situé proche du pôle. Par conséquent, on ne peut plus dire que toute la surface de la plaque A, dans son ensemble, se déplace à X cm/an. Chaque point a son propre vecteur vitesse.
C'est pourquoi on déduit les vitesses locales absolues NUVEL1 aux vitesses locales absolues GPS pour mesurer l'écart par rapport à un modèle en plaque rigide. C'est cet écart qui va nous donner la distribution spatiale du raccourcissement.
Ainsi, on prend comme référence une des deux plaques, par exemple B. On appelle Vrel la vitesse relative calculée de la station de la plaque A par rapport à la plaque B, on peut alors écrire : Vrel = VA - VB, avec VA : vitesse absolue de la station et VB : vitesse absolue de cette même station, dont on considère que le déplacement se fait à la même vitesse que celui de la plaque B.
Exemple de la station JOMO :
VNord,GPS(JOMO) - VNord,NUVEL1(JOMO) = 27 - (-4,6) = 31,6 mm/an vers le Nord.
VEst,GPS(JOMO) - VEst,NUVEL1(JOMO) = 35,8 -25,2 = 10,6 mm/an vers l'Est.
Ces valeurs sont les coordonnées du vecteur vitesse relatif de la station JOMO par rapport à l'Asie fixe. retour.
Réponses Q5-Q6
On déduit des vitesses de convergence entre différentes stations et l'Eurasie que plus on regarde « côté Eurasie », moins les vitesses sont élevées (comparer IISC, situé sur la plaque Inde, POKH, situé au Sud de l'Himalaya, SIMI et JOMO, au Nord de l'Himalaya, et KIT3 et POL2, situés sur la plaque Eurasie).
Tous les points ne se déplacent donc pas à la même vitesse (comparer aux valeurs hors Himalaya, par exemple celles de POL2 ou KIT3)...
On en déduit également que la plaque Eurasie n'est pas vraiment un bloc rigide. Le bord de cette plaque se déforme donc et cette déformation est à l'origine de l'Himalaya. Notez que le raccourcissement s'amortit vers le Nord (les vitesses relatives diminuent), la déformation étant accomodée par un épaississement lithosphérique. retour.